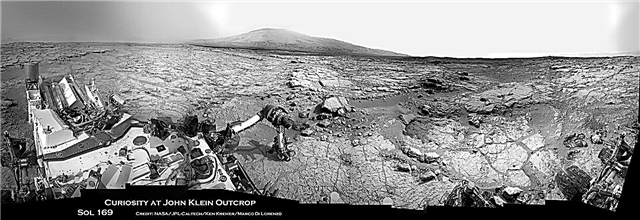
이미지 캡션 : 호기심은 정맥 암이 수화 된 광물의 John Klein 노두에서 로봇 팔이 붉은 행성의 표면에 눌려지는이 지점에서 Martian 암석으로 역사적인 1 차 시추를 수행합니다. 이 Navcam 카메라 이미지의 파노라마 사진 모자이크는 2013 년 1 월 25 일과 26 일 또는 Sols 168 & 169에 찍혔으며 궁극적 목적지 인 Mount Sharp과 함께 호기심의 자화상을 보여줍니다. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
과학 팀에 따르면 오래 기다렸고 화성에서 처음으로 드릴을 사용한 역사는 NASA의 Curiosity Mars Science Lab (MSL) 로버에 의해 2013 년 1 월 31 일 목요일 또는 Sol 174 일에 이루어질 예정이다. USGS의 Ken Herkenhoff 회원.
호기심의 첫 번째 시추 작업에는 로버가 현재‘존 클라인 (John Klein)’이라는 미네랄이있는 과학적으로 흥미로운 암석에 주차되어있는 위치에서 평평한 암석에 테스트 구멍을 뚫는 작업이 수반됩니다. 호기심의 현재 위치를 보여주는 위와 아래의 모자이크를 참조하십시오.
Herkenhoff는“이 테스트 중에 드릴 테일링은 수집되지 않으며, 이는 타악기 (회전이 아닌) 드릴링 모드 만 사용합니다.
호기심은 팀이 여전히 운영을 배우고있는 매우 복잡한 로봇입니다. 계획은 순간에 변경 될 수 있습니다.
Curiosity의 CheMin 및 SAM 분석 실험실에 실제 드릴 광미를 제공하는 작업은 여전히 며칠 이상 떨어져 있으며 테스트 드릴 구멍 및 추가 드릴링 테스트 결과를 검토해야합니다.
NASA의 제트 추진 연구소 (JPL)의 Curiosity 표면 샘플링 및 과학 시스템의 수석 시스템 엔지니어 인 Daniel Limonadi는“우리는 Curiosity의 첫 시추에 대한 접근 방식에 신중을 기하고 있습니다. “이것은 도전입니다. 화성에 샘플을 수집하기 위해 로봇이 암석을 뚫은 것은 이번이 처음 일 것입니다.”
Sol 166에서 Curiosity는 팀이 1 차 시추 장소로 선택한 John Klein 노출에 도달하기 위해 약 3.5 미터를 주행했습니다. 차 크기의 로버는 '옐로 나이프 만'으로 알려진 얕은 우울증을 조사하고 있는데, 화성 게일 분화구 내부에있는 그녀의 착륙 지점 근처에서 고대의 액체 물의 흐름이 반복되는 증거를 발견했습니다.
목요일 예정된 시추 작업을 예상하면서, 로버는 월요일 (1 월 27 일)에 일련의 4 가지 사전로드 테스트를 수행했으며, 이로써 로버는 John Klein 노두에서 Martian 표면 타겟에 드릴 비트를 놓고 아래로 눌렀습니다. 로봇 팔로 드릴에. 그런 다음 엔지니어는 데이터를 확인하여 힘이 예측과 일치하는지 확인했습니다.
Herkenhoff는“온도에 따라 압력이 어떻게 변하는 지 확인하기 위해 밤새 팔 중 하나를 밤새 눌렀습니다.

이미지 캡션 : Curiosity의 로봇 팔은 로봇 팔 도구 터릿 및 APXS (Alpha Particle X-Ray Spectrometer) 기기를 2013 년 1 월 25 일 Mastcam 34 카메라로 촬영 한이 사진 모자이크에 표시된 John Klein 노출 상단에 배치하거나 Sol 168 드릴 비트와 갈래가 공구 포탑에서 바로 향하고 있습니다. 크레딧 : NASA / JPL-Caltech / MSSS / Ken Kremer / Marco Di Lorenzo
화성에서 매일 (65 C 또는 115 F 이상) 엄청난 온도 변화가 발생하기 때문에, 팀은 화성 표면으로 드릴을 누르는 동안 팔에 과도한 스트레스가 있는지 여부를 확인해야합니다. 매일의 온도 변화로 인해 팔, 섀시 및 이동 시스템과 같은 로버 시스템이 약 10 분의 1 인치 (약 2.4 밀리미터)만큼 확장되고 접촉 할 수 있으며 이는 미국의 1/4 달러 동전의 두께보다 약간 더 큽니다.
Limonadi는“드릴 작업을 시작한 후 밤새 드릴 작업을 할 계획은 없지만이 경우 하드웨어에 대한 스트레스 측면에서 무엇을 기대해야하는지 알아야합니다. "이 테스트는 하드웨어를 위험에 빠뜨리지 않으면 서 온도 영향에 대해 배울 수 있도록 드릴링 중에 사용하려는 것보다 낮은 예압 값에서 수행됩니다."
암 터릿의 고해상도 MAHLI 현미경 이미 저는 시추 작업의 성공 여부를 평가하기 위해 노두 대상 이미지의 전후에 클로즈업을 수행합니다.
Sol 175에서는 또 다른 중요한 활동이 계획되어 있으며, 지구에서 가져온 '공백'유기 체크 샘플 중 하나가 SAM 분자로 전달되어 유기 분자의 육상 오염 흔적을 확인하고 샘플 처리 여부를 분석 할 수 있습니다. 이 시스템은 Rocknest windblown sand ripple의 임무에서 초기에 성공적으로 청소되었습니다.
한편 화성의 반대편에있는 NASA의 기회 로버는 10 년 전에 Endeavor 분화구에서 액체 물이 흘러 나오게 된 필로 실리케이트 점토 광물을 만지지 않은지 10 년을 시작합니다.
NASA의 화성 자매의 흥미 진진한 결과를 기대하십시오.

이미지 캡션 : 옐로 나이프 베이와 존 클라인 노두의 호기심에서 샤프 산 전망. 이 사진 모자이크는 2013 년 1 월 27 일 Mastcam 34 카메라 또는 Sol 170으로 찍은 사진입니다. 크레딧 : NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer

시추 전에 하중 테스트를위한 호기심의 훈련. NASA의 Mars rover Curiosity의 로봇 팔 끝에있는 공구 터렛의 타악기 훈련은이 이미지에서 로버의 전면 Hazard-Avoidance Camera (Hazcam)에서 암석 표면에 닿아 있습니다. 크레딧 : NASA / JPL-Caltech

이미지 캡션 : 호기심은 오른쪽 상단의 John Klein 노출로 운전하기 전에 Sol 157 (2013 년 1 월 14 일)의 옐로 나이프 베이 가장자리에서이 사진 모자이크에 표시된 매우 다양한 암석 풍경에서 물이 흐르는 증거가 널리 퍼져 있습니다. 로버는 그 후 John Klein 노두에서 평평한 바위에 주차되어 2013 년 1 월 31 일에 역사적인 1st Martian 암석 시추를 실시 할 예정입니다. 'John Klein'은 강의 강수량을 강력하게 암시하는 수많은 미네랄 정맥으로 채워져 있습니다. 액체 물의 미네랄. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo