두 개의 작은 호핑 로봇이 이제 큰 소행성 Ryugu의 표면에 동반자가 있습니다.
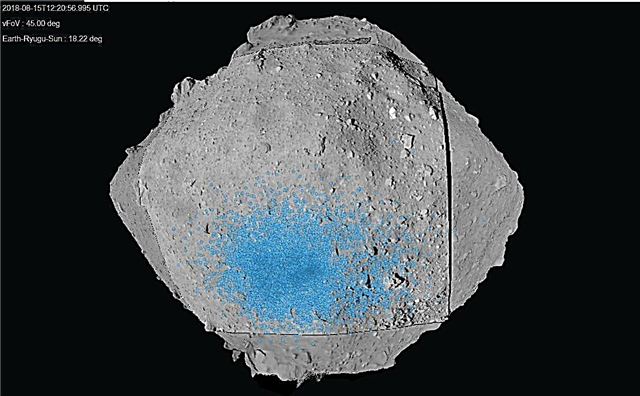
오후 9시 57 분에 계획된 모함 인 일본의 하야부사 2 우주선에서 배치 된 이동식 소행성 표면 정찰대 (MASCOT)라고 불리는 신발장 크기의 착륙선. EDT 화요일 (10 월 2 일, 10 월 3 일 0157 GMT) 이후 곧 류구에 휴식을 취했습니다. 착륙선의 첫 소행성 류 구이 사진은 바위 같은 세계와 심지어 MASCOT 자신의 그림자를 보여줍니다.
독일 브레멘에있는 DLR Institute of Space Systems의 MASCOT 프로젝트 관리자 인 Tra-Mi Ho는 성명을 통해 "더 나아질 수는 없었다"고 말했다. (DLR은 독일 우주 항공국 (Cerman Aerospace Center)의 약자이며 CNES는 프랑스 우주국 인 CNES와 협력하여 MASCOT를 구축했습니다.)

호는 덧붙였다.“착륙 자의 원격 측정에서 우리는 그것이 우주선과 분리되어 약 20 분 후에 소행성 표면과 접촉 한 것을 볼 수 있었다”고 덧붙였다.
MASCOT은 이미 카메라, 방 사계, 분광계 및 자력계와 같은 4 개의 내장 과학 기기로 데이터 수집을 시작했다고 미션 팀원들은 말했다. 22 파운드. 착륙 후 16 시간 만에 배터리가 방전 될 것으로 예상되므로 착륙선은 서둘러야합니다 (10 킬로그램).
MASCOT은 Ryugu를 향해 천천히 내려가는 동안 20 장의 사진을 찍었으며,이 이미지는 현재 하야부사 2 호에 저장되어 있다고 미션 팀원들은 말했습니다. 그리고 분리 전의 자력계 (하야부사 2가 류구 위 51 미터 또는 약 51 미터)에서 관측 한 결과 이미 지구로 내려갔습니다.
독일의 브라운 슈 바이크 공과 대학 MASCOT 팀 멤버 인 Karl-Heinz Glaßmeier는 "이 측정은 태양풍의 상대적으로 약한 전계와 우주선으로 인한 매우 강한 자기 교란을 보여준다"고 말했다. "분리 시점에, 우리는 간섭 장의 분명한 감소를 예상했고이를 명확하게 인식 할 수있었습니다."

MASCOT은 MINERVA-II1A 및 MINERVA-II1B의 발자취를 따라 2 개의 2.4 파운드를 따릅니다. 9 월 21 일 밤 하야부사 2에서 배치 한 로버 (1.1kg).이 작은 로봇은 모두 터치 다운을 시작했고 곧 류구 표면을 탐험하기 시작했습니다.
일본식 MINERVA-II1A 및 MINERVA-II1B와 같이 자율적 인 MASCOT은 호핑을 통해 움직일 수 있으며, 본체 내부의 금속성 "스윙 암"을 조작하여 수행됩니다. 착륙선은 또한이 팔을 Ryugu의 표면에 맞출 수 있습니다. 중요한 것은 MASCOT이 데이터를 수집하고 하야부사 (Hayabusa2)로 전송하기 위해 오른쪽에 있어야하기 때문입니다.

1 억 5 천만 달러 규모의 하야부사 2 임무는 2014 년 12 월에 시작되어 올해 6 월 말에 류구 주변에서 궤도에 도착했습니다. 이 모선에는 로버 배치가 하나 더있을 수 있습니다. 여전히 "선택적"호퍼 MINERVA-II2를 운반하며 내년 Ryugu의 표면으로 이어질 수 있습니다.
그리고 궤도 자체는 비 폭발성 임팩터 배럴을 Ryugu로 보낸 후 2019 년에도 우주 암석으로 내려갈 것입니다. 하야부사 2는 새로 생성 된 분화구에서 이전에 지하 표면 샘플을 채취 할 것입니다. 이 자료는 2020 년 12 월에 반환 캡슐로 지구로 내려갈 예정입니다.
Ryugu의 임무와 회수 된 샘플을 조사하는 과학자들이 수집 한 데이터는 태양계의 초기 역사와 Ryugu와 같은 탄소가 풍부한 소행성이 지구에서 생명체의 출현에 어떤 역할을했는지에 대해 많은 정보를 제공해야한다고 Hayabusa2 팀원은 말했다.

NASA는 광범위하게 유사한 목표를 가지고 자체 소행성 샘플링 임무를 수행하고 있습니다. OSIRIS-REx 프로브는 12 월 31 일에 1,650 피트 너비 (500m)의 소행성 Bennu 주위에 궤도에 도착하고 2023 년 9 월에 지구로 샘플을 반환 할 예정입니다.
이 이야기는 10 월 3 일 오전 2시 45 분 (EDT)에 MASCOT이 안전하게 착륙하여 데이터 수집을 시작했다는 소식으로 업데이트되었습니다.