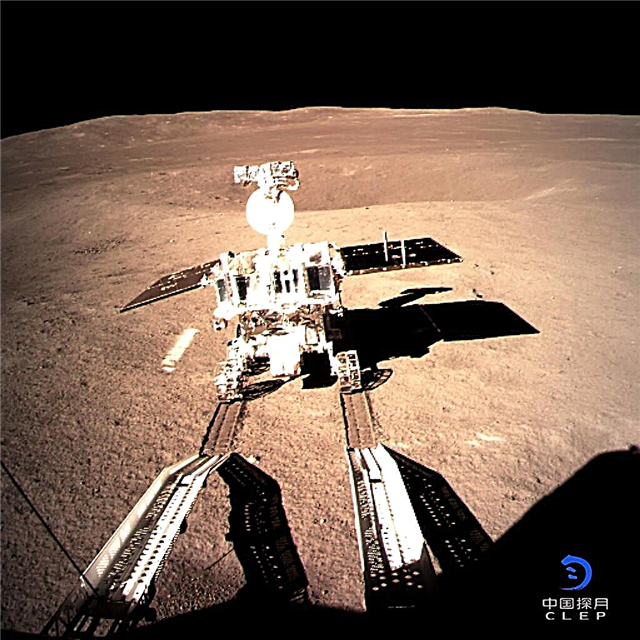
달의 먼쪽에는 이제 첫 번째 로버 트랙 세트가 있습니다.
지난 밤 (1 월 2 일), 중국의 로봇 Chang'e 4 랜더 로버 듀오는 달의 가장 큰 먼 쪽에서 최초의 부드러운 터치 다운을 해제했습니다. 그리고 오늘 (1 월 3 일), 로버는 115 마일 너비 (186km)의 폰 카르만 분화구의 회색 흙 바닥으로 굴러 가서 고정 착륙선 위의 이전 위치에서 쌍둥이 경사로를 뛰어 넘었습니다.
또한 오늘, 중국은 로버의 이름 인 "Yutu 2"를 공개했습니다. 이 이름은 굉장히 독창적이지는 않지만 많은 의미가 있습니다. 원래 Yutu 로버는 2013 년 12 월 Chang'e 3 임무에서 달 근처에 착륙선과 함께 손을 down습니다. 그리고 Chang'e 4는 원래 Chang'e 3의 백업으로 설계되었으므로 두 미션은 많은 하드웨어를 공유합니다. [중국의 Changee 4 Moon Farside 랜딩]

Yutu 2와 착륙선 동료는 첫 번째 심층 과학 조사를 수행 할 것입니다. 이 두 기술은 각각 4 개의 과학 장비를 토트했으며,이 기술을 사용하면 Von Kármán의 표면과 표면 근처를 매우 상세하게 특성화 할 수 있습니다. 이 분화구는 2,500km (2,500km)의 남극-아이켄 분지보다 훨씬 더 큰 충격 기능 내에 있습니다.
착륙선은 또한 생물학적 실험을한다 : 누에 알을 포함하는 작은 주석과 감자를 포함한 여러 식물 종의 씨앗. 임무 팀원들은이 유기체가 저 중력 환경에서 어떻게 성장하고 발달하는지 연구하는 것을 목표로합니다.

달의 먼 쪽이 항상 우리 행성에서 떨어져 있기 때문에 착륙선과 Yutu 2는 데이터를 지구로 직접 전송하지 못합니다. 실제로,이 통신 문제는 먼 쪽 표면이 이전에 어떤 기능적인 우주선을 환영하지 않은 큰 이유입니다 (몇 년 동안 몇 개의 탐사선이 충돌했지만).
따라서 Chang'e 4 duo는 2018 년 5 월에 달을 넘어 중력 적으로 안정적인 지점으로 중국이 발사 한 Queqiao라는 중계 위성에 의존 할 것입니다. Queqiao는 유리한 지점에서 착륙선 및 지구인 Yutu 2를 계속 볼 수 있습니다. 동시에.
Chang'e 4는 위성이 중국 신화의 달의 여신에서 이름을 딴 중국의 야심 찬 로봇 음력 탐사 프로그램의 최신 단계입니다. (이 신화에서 Yutu는 Changee의 애완용 토끼입니다.) Changee 1과 Changee 2 임무는 2007 년과 2010 년에 각각 달에 궤도 선을 보냈으며 Chang'e 3은 2013 년 후반에 가까운 터치 다운.
그런 다음 2014 년 10 월, Chang'e 5T1 미션은 달을 8 일 동안 여행하면서 프로토 타입 캡슐을 출시했습니다. 주요 목표는 올해 초에 출시 될 수있는 Chang'e 5 샘플 반환 임무에 필요한 기술을 입증하는 것입니다.
외계 생명체를 찾는 것에 관한 Mike Wall의 저서 "저 밖에"(Grand Central Publishing, 2018;칼 테이트)가 종료되었습니다. 트위터에 그를 따라michael. 우리를 따라@Spacedotcom또는페이스 북. 원래에 게시Space.com.