호기심은 게일 분화구 안에있는 '딩고 갭'모래 언덕으로 동쪽으로 돌아갑니다.
2 월 솔 539에서 3 피트 (1 미터) 높이의 사구를 건넌 후 신용 : NASA / JPL / Ken Kremer- kenkremer.com/Marco Di Lorenzo
아래의 모래 언덕 및 바퀴 모자이크를 참조하십시오 – 스토리 업데이트 [/ 캡션]
게일 분화구 바닥에 걸쳐 NASA의 호기심 로버의 서사시 트레킹을 지휘하는 팀은 최근 몇 개월 동안 거친 붉은 행성 지구를 운전하여 발생하는 예기치 않은 바퀴 손상에 대한 새로운 운전 전략과 새로운 방법을 채택했습니다.
이번 주 엔지니어들은 모래 언덕 버기 호기심이 착륙 이후 처음으로 화성 표면 위로 긴 거리를 뒤로 운전하도록 지시했습니다.
SUV 크기의 차량은 분명히 플라잉 컬러로 리버스 드라이빙 타당성 테스트를 통과했으며 현재 주요 미션 목적지 인 우뚝 솟은 마운트 샤프 (Mount Sharp) 산의 기슭에 퇴적층을 목표로하는 흥미 진진한 여정으로 가고 있습니다. km) 화성 하늘로 들어가고 물이 바뀌는 광물을 소유합니다.
캘리포니아 패서 디나 NASA 제트 추진 연구소의 Curiosity 프로젝트 관리자 인 Jim Erickson은“우리는 검증 된 툴킷에서 역으로 운전하고 싶었습니다.
2 월 18 일 화요일, 호기심은 후진으로 움직였을뿐만 아니라 100.3 미터 (329 피트) 거리가 3 개월 동안 가장 먼 하루 전진을 기록했습니다.
그리고 그녀는 또한 팀이 NASA의 Mars Reconnaissance Orbiter (MRO)의 머리 위를 돌고있는 망원 카메라로 수집 한 고해상도 영상 관측을 기반으로 통과 경로를 변경하기로 결정했을 때, 원하는대로 더욱 매끄러운 화성 지형을 뛰어 넘고 있습니다.
목표는 직경 20 인치 휠의 마모를 최소화하는 것입니다.

엔지니어들은 지난 몇 달 동안 날카로운 모서리의 화성암이 뿌려진 들판을 운전하면서 알루미늄 휠에 상당한 펑크와 찢어짐이 축적 된 후 새로운 주행 기술을 고안하고 새로운 경로를 고려해야했습니다.
에릭슨은“우리는 샤프 산의 경사면으로 향하는 큰 그림을보고, 다른 잠재적 경로와 목적지 지역으로의 다른 진입 지점을 평가하기 위해 초점을 변경했습니다.
“완벽한 길은 없습니다. 우리는 불완전한 것들 중에서 가장 좋은 것을 찾아야합니다.”
그러나 6 개의 바퀴 달린 로버는 먼저 부드러운 지형과 과학이 풍부한 목표에 도달하기 위해 먼저‘딩고 갭 (Dingo Gap)’모래 언덕으로 알려진 관문을 통과해야했습니다.

Caltech의 호기심 책임 수사관 John Grotzinger는“Moonlight Valley”는 Dingo 너머의 숨막히는 새 로케일의 이름이라고 Space Magazine에 말했다.
호기심은 2 월 9 일에 3 피트 (1 미터) 높이의 딩고 갭 (Dingo Gap) 모래 언덕을 통과하여“문라이트 밸리 (Moonlight Valley)”와 그 이후의 지역으로 이동했습니다.
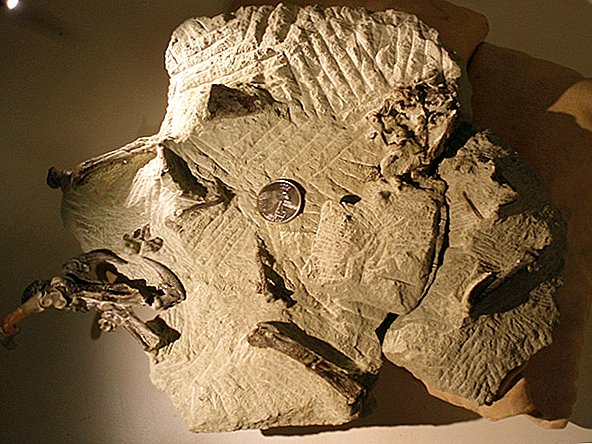
Grotzinger는“Moonlight Valley는이를 통해 많은 정맥을 뚫고 있습니다.
"우리는 열성 기반암을보고 있습니다."

Dingo Gap 게이트웨이를 통과 한 이후, Curiosity는 2012 년 8 월 6 일에 못 물린 착륙 이후 총 13.24 마일 (5.21km)의 총 임무 주행 거리 측정을 위해 285.5 미터 (937 피트)를 더 여행했습니다.
“우리가 모래 언덕을 극복 한 후 우리는 궤도 데이터를 기반으로 예상 한 것처럼 보이는 지형에서 운전을 시작했습니다. 날카로운 바위가 적고, 바위가 느슨하고, 대부분의 경우 차량을 완충시키는 모래가 조금 있습니다.”라고 Erickson은 말했습니다.

호기심의 단기 목표는 킴벌리 (이전 명칭 KMS-9)라는 다음 과학 웨이 포인트에 도달하는 것입니다.
킴벌리는 다른 암석 층의 교차점에 있기 때문에 과학 팀에 관심이 있습니다.
1 톤 로봇은 킴벌리 (Kimberly)의 다른 암석을 뚫을 수 있습니다.
승인 된 경우, Kimberly는 지난 봄 Cumberland 암석 목표물에 구멍을 뚫은 후 2013 년 7 월 옐로 나이프 베이 지역을 떠난 후 거주 구역을 발견 한 이후 처음으로 드릴링 작업을 시작했습니다.

현재까지 호기심의 주행 거리계는 5.2km이며 118,000 개가 넘는 이미지를 촬영했습니다. 로봇은 샤프 산 기슭에 도달하기 위해 약 5km를 더 가야합니다.
한편 NASA의 여동생 기회 로버는 MRO가 궤도에서 촬영 한 이미지로, 붉은 행성의 미스터리를 조사하는 2 학년이 시작될 때 화성 반대편 Solander Point 정상에서 점토 광물 노두를 탐험했습니다.
그리고 지구의 침략 함대 인 NASA의 MAVEN과 인도의 MOM을 강화하기 위해 한 쌍의 새로운 궤도 선이 붉은 행성으로 뛰고 있습니다.
Ken의 계속되는 호기심, 기회, Chang'e-3, SpaceX, 궤도 과학, LADEE, MAVEN, MOM, 화성 및 더 많은 행성 및 인간 우주 비행 뉴스를 확인하십시오.