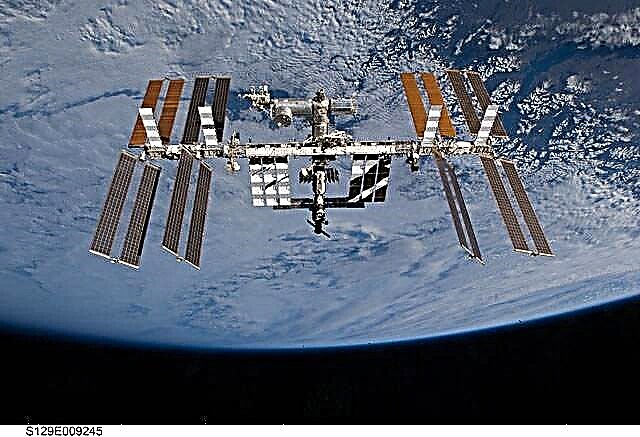
11 월에, ESA 우주 비행사 Luca Parmitano는 국제 우주 정거장 (ISS)에서 로버를 지휘하여 역사를 만들었습니다. Analog-1 실험의 일환으로이 공간은 "우주 인터넷"명령 인프라와 강제 피드백 제어 설정 덕분에 가능했습니다. 이로 인해 Parmitano는 8km / s (28,800km / h; 17,900mph)의 속도로 지구를 공전하면서 10,000km (6,200 마일) 떨어진 로버를 원격으로 작동 할 수있었습니다.
ESA의 METERON (Multi-Purpose End-To-End Robotic Operation Network) 프로그램의 일부인이 실험은 ESA의 유럽 과학 연구 및 기술 센터 (ESTEC) 근처 네덜란드 발켄 부르크에서 격납고에서 진행되었습니다. 11 월 18 일에 발생한 첫 번째 테스트는 Parmitano가 달 표면처럼 보이고 느끼도록 설계된 장애물 코스를 통해 로버를 안내하는 것을 포함했습니다.
이 테스트는 정교한 제어 네트워크와 제어 기능을 검증하여 우주 비행사에게 터치 감각을 제공합니다. 11 월 25 일에 열린 두 번째 테스트에는 로버가 시뮬레이션 된 음력 환경을 탐색하고 암석 샘플을 채취하고 수집하는 작업이 포함되었습니다. 이 시험은 외계 세계에 대한 지질 조사를 수행하는 원격 운영 로버의 능력을 평가했습니다.

Analog-1 테스트 캠페인을 주도하고있는 ESA 엔지니어 Kjetil Wormnes는 최근 ESA 보도 자료에서 다음과 같이 말했습니다.
“로봇을 지구상에서 Luca의 아바타로 상상해 보아 비전과 터치를 모두 제공하십시오. 루카와 멀리 떨어진 과학자들이 환경을 관찰하고 암석을 가까이에서 볼 수 있도록 두 대의 카메라 (하나는 손바닥에, 다른 하나는 조종 가능한 팔에)를 장착했습니다.”
Parmitano는 Sigma 7 강제 피드백 장치 (사용자에게 6 자유도를 제공함)와 한 쌍의 모니터를 사용하여 좁은 경로를 통해 로버를 안내하여 3 개의 서로 다른 샘플링 지점에 도달하고 분석 할 암석을 선택했습니다. 그 동안 독일 쾰른에있는 유럽 우주 비행사 센터 (EAC)에 기반을 둔 지질 전문가 팀이 그와 접촉하여 어떤 암석이 유망한 연구 목표인지 조언했습니다.
이런 종류의 기술이 지상에서 로봇을 제어하기 위해 ISS에서 처음으로 사용되었습니다. 또한 우주 비행사에게 지질 연구에 익숙해 지도록 설계된 ESA에서 수행 한 이전 프로젝트를 기반으로 구축되었습니다. ESA의 탐색 시스템 그룹의 METERON 프로젝트 책임자 인 Jessica Grenouilleau는 다음과 같이 지적했습니다.
“우리는 Pangea 프로그램을 통해 Luca의 이전 교육을 통해 우주 비행사에게 지질학에 실질적인 경험을 제공했습니다. 승무원과 과학자 사이의 효율적인 토론에 큰 도움이되었습니다.”

로버와 ISS 간의 양방향 제어 링크는 정지 궤도 (GSO)에 배치 된 통신 위성 덕분에 가능해졌습니다. 이것들은 Parmitano를 EAC와 테스트가 진행된 격납고에 연결 시켰으며 대기 시간 (또는 시간 지연)은 0.8 초에 불과했습니다. 혁신적인 인터페이스 덕분에 Luca는 로봇이지면에 닿거나 바위를 집는 것을 느낄 수있었습니다.
이 실험에 사용 된 METERON 하드웨어 및 소프트웨어는 네덜란드 Noordwijk에 위치한 ESA의 휴먼 로봇 상호 작용 연구소에서 개발했습니다. 독일 항공 우주 센터 (DLR) 로봇 공학 및 메카트로닉스 연구소에서 지원을 받았으며, 제어 소프트웨어를 통합하고 시간 지연을 고려하여 시스템 피드백을 최적화하는 일을 담당했습니다.
HRI Lab 책임자 인 ESA 로봇 엔지니어 Thomas Krueger는 다음과 같이 설명합니다.
상대적으로 짧은 시간 지연을 수반하는이 탐색 시나리오에서 우리는 인간과 로봇의 상대적 장점을 결합 할 수있었습니다. 인간은 복잡하고 구조화되지 않은 환경과 의사 결정을 처리 할 수있는 능력을 갖춘 인간과 열악한 환경에 대처하고 운영자의 명령을 정확하게 실행합니다.
“강제 피드백 및 직관적 인 컨트롤로 운전자 경험을 향상시킴으로써 이전에는 불가능했던 로봇 제어 작업을 실현하고 새로운 공간 탐색 방법을 열 수 있습니다. 우리는 이제 Luca의 데이터 및 피드백을 분석하여 그가 수행 한 방법에 대한 세부 정보를 확인하고 향후 탐사 계획을 개선하고 준비 할 수있는 곳을 찾는 데 열중하고 있습니다.”

Analog-1 실험은 ISS와 관련된 점진적으로 더 도전적인 METERON 휴먼 로봇 테스트 캠페인 중 최신입니다. 첫 번째 강제 피드백 테스트 (1 자유도 포함)는 2015 년 Haptics-1 실험의 일부로 다시 시작되었습니다. 2016 년에 DLR의 Kontur-2 2 자유도 실험이 이어졌습니다. 이 모든 최신 6도 자유 실험에서 정점에 도달했습니다.
다음 단계는 내년 언젠가 진행되며 달과 같은 환경 (현재 TBD에 위치)에서 실외 시뮬레이션을 수행 할 것입니다. 이 단계의 테스트를 위해 로버는 전체 음력 표면 임무와 최대한 유사하도록 설계된 시나리오에서 로컬 암석 샘플을 수집하고 검사합니다.
머지 않아 로봇 탐험가들이 달과 화성으로 보내지면, METERON은 우주 비행사들이 지구로부터 신호를 보내지 않고 달의 관문과 화성 기지 캠프와 같은 궤도 서식지에서 그들을 조종하게 할 것입니다. 이 기술은 또한 우주 비행사가 접근 할 수 없거나 접근이 불가능한 위험한 환경을 탐험 할 수있게합니다.
ESA에 의거하여 최신 Analog-1 테스트에 대한이 비디오를 확인하십시오.