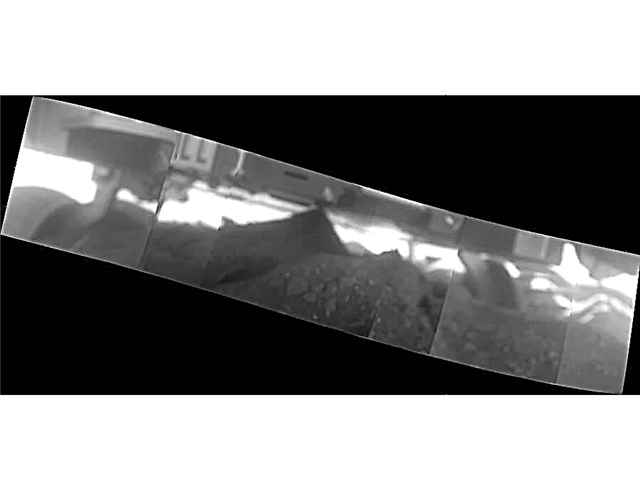
스피릿 로버는 이제 몇 주 동안 붙어 있던 땅을 보여주는 두 세트의 클로즈업 이미지를 촬영했습니다. Spirit은 로봇 팔의 현미경 이미 저를 사용하여 차량의 내장 방법과 로버를 방해하는 물체가 있는지 판단하기 위해 자신의 배 아래로 피어링했습니다. 확실히, 이미지는 방해가 될 수있는 암석이나 흙을 보여주는 것처럼 보이지만, 로버 팀이 로버를 현재 상황에서 벗어나기위한 전략을 개발하려면 더 많은 그림과 테스트가 필요합니다. 로버 프로젝트 매니저 인 존 칼라스 (John Callas)는이 목적을 위해 로봇 팔을 사용하는 것이 원래의 디자인 북에는 없었지만 꽤 잘 작동 한 것으로 보인다고 말했다.
정신은 로버의 한쪽에서 다른쪽으로 토양에있는 그녀의 바퀴를 반쯤 파고 들어갔다. 로버 엔지니어와 운전자는 스피릿이 너무 깊게 파서 배가 바위에 앉을 수 있고 한 바퀴가 바위에 걸리는 것을 걱정했습니다.
카메라는 일반적으로 화성암과 토양의 클로즈업 이미지를 촬영합니다. 로버 밑을보기 위해 그것을 사용하는 기술은 Spirit 's twin, Opportunity에서 테스트되었으며 잘 작동했습니다. 첫 번째 이미지 세트는 약간 초점이 맞지 않았지만 New Scientist의 기사에 따르면 Spirit은 화요일에 추가 이미지를 가져 와서 하나의 장애물을 보여 주었지만 바위인지 먼지인지 여부는 명확하지 않았습니다. 그리고 물체가 로버의 밑면에 부딪히는지도 명확하지 않았습니다.
지난 주 스페이스 매거진의 한 기사에서 칼라스는 이것이 로버가 겪었던 최악의 곤경 중 하나이지만, 그는 정신을 빼앗는 것에 대해 낙관적이라고 말했다. “마지막 드라이브에서도 로버가 휠 스핀을 기준으로 한 부분에 불과하더라도 여전히 움직이고 있음을 알았습니다. 즉, 재료가 여전히 바퀴 아래로 운반되고 있음을 알려줍니다. 충분한 시간과 충분한 바퀴 회전이 주어지면 우리는 나올 수 있어야합니다. 그것이 바뀌면 백퍼센트 미끄러지는 상황에 처하게되면 어려움에 처하게됩니다. 하지만 아직은 99.9 %인데도 100 % 사이에 큰 차이가 있습니다. "
그리고이 최신 시도가 효과가 없다면, 칼라스는 로봇 팔 소매에 대한 다른 아이디어가 있다고 말합니다. "더 전통적인 방법이 효과가 없다면 우리가 고려해야 할 이국적인 것들이있다"고 그는 말했다. 떨림에 많은 화살이 있거나 툴 벨트에있는 도구를 먼저 사용해보십시오. "
출처 : 새로운 과학자, John Callas와의 이전 인터뷰 / 기사