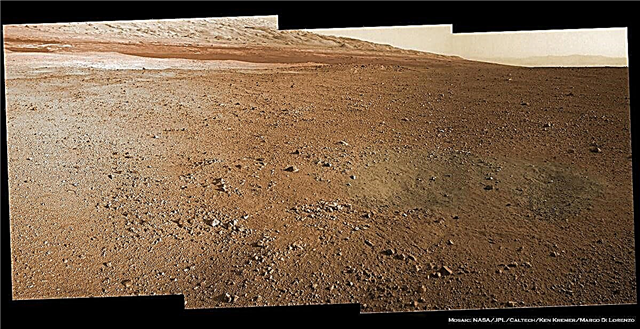
이미지 캡션 : 호기심의 게일 분화구 상륙지에있는 샤프 산의 모자이크. 흐릿한 거리에서 게일 분화구. 이 모자이크는 Sol 2 (8 월 8 일)에 Curiosity가 반환 한 3 가지 풀 해상도 Navcam 이미지로 꿰매어 34 밀리미터 카메라의 Mastcam 이미지를 기반으로 색상을 지정했습니다. Ken Kremer와 Marco Di Lorenzo의 처리. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
호기심 로버는 샤프 산의 첫 번째 상세 이미지를 다시 보여 주었고, 궁극적 인 운전 목표에 대한 놀라운 초기 시각을 제공했으며, 이번 주말에 그녀를 완전히 작동하는 로버로 변모시키는 중요한 "두뇌 이식"의 한가운데에 있습니다.
이 과학 팀은 6 륜 호기심이 후일에 게일 분화구 내에서 착륙 지점의 바닥을 횡단하고 광범위하게 조사한 후 로버의 2 년차 1 차 미션 중에 샤프 산 등반을 시작하도록 지시 할 것입니다.
34 밀리미터 마스트 캠 컬러 카메라를 기반으로 한 채색 된 새로 세워진 카메라 및 기기 마스트에있는 Navcam 내비게이션 카메라에 스냅 된 3 개의 전체 해상도 이미지를 사용하여 Sharp Sharp 산에 초점을 맞춘 모자이크를보십시오.
호기심은 화성 표면에 거의 평평하게 놓여 있었지만 정면에서 약간 3도 기울어졌으며 지금까지 이미지는 대략 6 마일 정도 정도의 미리 프로그래밍 된 관점에서 찍은 것입니다.
이 지형은 작은 자갈로 흩어져 있는데,이 자갈은 근처에있는 충적 선풍기에서 유래하여 액체가 오래 전에 흘러 나왔을 것이라고 과학자는 생각합니다. NASA의 Mars Reconnaissance Orbiter로 궤도에서 관측 한 결과 샤프 산의 하층에서 점토와 황산염 광물이 발견되어 습한 역사를 나타냅니다. 고지대에서 과학자들은 경계층과 고대 화성의 지표면에서“위대한 데스 이벤트 (Great Dessication Event)”와 액체 물의 손실로 이어진 지표를 발견하기를 희망합니다.
이번 주말 호기심은 지금까지 다른 어떤 것을 훨씬 능가하는 화려한 고해상도 마스트 캠 이미지를 전송하기 시작했습니다. NASA가 지금까지 조립 한 Mastcam 360 파노라마는 다음과 같습니다.

이미지 캡션 : 호기심의 마스트 캠 이미지의 최초 고해상도 컬러 모자이크. NASA / JPL- 칼텍 / MSSS
그러나 자동차 크기의 로봇이 실제로 돌아 다니기 전에, 7 피트 (2 미터) 길이의 장비가 장착 된 암으로 손을 뻗어 온보드 화학 실험실에서 분석을 위해 샘플을 퍼내어 과학 과제를 완수하려면 소프트웨어 스마트가 필요합니다.
캘리포니아 주 파사 데나에있는 NASA의 Jet Propulsion Lab의 엔지니어들은 모든 초기 착륙 목표를 달성하면서 이번 주말에 표면 작업에 최적화 된“R10”이라는 새로운 소프트웨어 패키지를 업로드하기 위해 4 솔 또는 화성의 날을 보내고 있습니다. 현재“R9”패키지를 대체합니다.
Mars Science Laboratory 미션의 수석 소프트웨어 엔지니어 인 캘리포니아 주 패서 디나에있는 NASA의 Jet Propulsion Laboratory의 Ben Cichy는“우리는 미션의 여러 단계에 필요한만큼 소프트웨어를 업그레이드 할 수 있도록 처음부터 미션을 설계했습니다. “현재 Curiosity가 사용하고있는 비행 소프트웨어 버전은 실제로 차량 착륙에 중점을 두었습니다. 더 이상 필요하지 않은 많은 기능이 포함되어 있습니다. 이 시스템은 로버를 지상에서 작동시키는 기본 기능을 제공하지만, 지상 운영에 최적화 된 비행 소프트웨어 버전으로 착륙 한 후 전환하도록 계획했습니다.”
기본 컴퓨터와 백업 컴퓨터의 소프트웨어가 단계별로 신중하게 업그레이드되고 있습니다. 그는 금요일에 업그레이드를 테스트하기위한 초기“발가락”이 첫 단계라고 말했다.
“R10은 표면 작업에 최적화되어 있으며 과학 팀이 원하는 것을 가지고 있습니다. Cichy는 8 월 10 일 JPL 뉴스 브리핑에서 설치 과정에서 다음 4 개의 Sols에 대한 과학을지지 할 것이라고 말했다.
"지금은 기본 표면 소프트웨어에 기기의 상태를 확인할 수있는 기능이 있지만, 화성에 제공 한이 모든 훌륭한 하드웨어를 최대한 활용할 수있는 기능은 없습니다."
“R10 소프트웨어는 로봇 팔을 완전히 사용하고, 드릴을 사용하고, 먼지 제거 도구를 사용하고, 전체 샘플링 체인을 사용하고, 샘플을 손상시키고 분석 할 수있는 기능을 제공합니다. ”
“Curiosity는 화성의 메가 로버이며 운전하기 위해 태어났습니다! R10은 자율적으로 운전하고 이미지를 사용하여 위험을 감지하고 안전하게 운전할 수있는 능력을 제공합니다.”
지금까지 이번 주말에 소프트웨어 업그레이드가 예정되어 있습니다.
호기심은 8 월 5 일 / 6 일 게일 분화구 내부에 전례없는 정확한 지점 착륙을 시켰으며 로켓으로 구동되는 "스카이 크레인 (Sky Crane)"하강 단계를 이용하여 케이블로 호기심을 낮게 만든 평원에서 계획된대로 정확히 붉은 행성의 표면 위의 케이블로 호기심을 낮추었습니다. 거대한 산의 기초.
샤프 산은 넓이가 154km 인 게일 분화구 내부를 덮고 있습니다. 5.5 마일 (5.5km) 높이의 산봉우리는 캘리포니아 휘트니 산보다 높습니다.
비교를 위해, 저해상도 어 안식 Hazcam 카메라에서 2D 및 3D로 샤프 산의 호기심의 초기 더 넓은 필드 포스트 랜딩 샷을 참조하십시오.
NASA의 1 톤 메가 로버 호기심은 다른 지구 표면으로 보내진 가장 크고 가장 복잡한 로봇으로, 이전의 로빙 차량보다 15 배나 더 많은 10 개의 최신 과학 장비를 탑재하고 있습니다. 호기심의 목표는 화성이 과거 또는 현재의 미생물 생명체를 지원할 수 있는지 여부를 결정하고 유기 분자 형태의 생명 징후를 검색하는 것입니다.