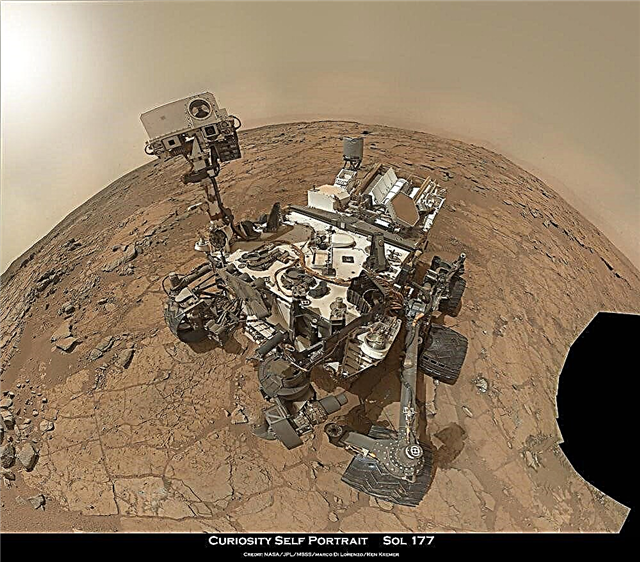
지구에서 가장 진보 된 행성 로봇은 화성암의 내부에 성공적으로 구멍을 뚫고 인류가 우주를 탐험하면서 역사적인 최초의 위업으로 신선한 샘플을 수집했습니다.
NASA의 호기심은 약 0.63 인치 (16mm), 깊이는 약 2.5 인치 (64mm)의 원형 구멍을 황산 칼슘의 수화 된 미네랄 정맥이있는 미세한 퇴적암 암석 슬래브에 뚫고 주변에 회색 광미의 슬러리를 생성했습니다. 구멍. 연구팀은이 지역이 화성이 따뜻하고 습한시기에 흐르는 액체 수의 여과를 반복적으로 경험했으며 생명의 진화에 더 우호적이라고 믿고있다.
정밀 드릴링은 2013 년 2 월 8 일 금요일 미션의 Sol 182에서 이루어졌으며 2 월 9 일 토요일 오늘 지구로 이미지가 다시 전송되었습니다. 게일 분화구 내부에서 2012 년 8 월 6 일.
로버 전체 팀은 역사상 최초의 시추 및 표면에 깨끗한 외계인 암석으로 채집 된 Curiosity Mars Science Laboratory (MSL) 로버의 설계, 조립, 발사 및 착륙을위한 거의 10 년의 힘든 노력 끝에 비교할 수 없을 정도로 기뻐했습니다. 우리 태양계에서 다른 행성의.
NASA의 Science Mission Directorate 부사장 John Grunsfeld는“지금까지 설계된 가장 진보 된 유성 로봇은 화성에서 완전히 작동하는 분석 실험실입니다.
"이것은 지난 8 월 미국이 자랑하는 또 다른 날인 스카이 크레인 착륙 이후 호기심 팀이 달성 한 가장 큰 이정표입니다."
시추는 미션의 핵심입니다. 토양과 암석 샘플을 수집하여 화학 성분을 결정하고 미량의 유기 분자 (생명의 구성 요소)를 찾는 것이 절대적으로 필요합니다. 그 목적은 화성이 과거에 존재했던 화성 미생물을 지원하기에 적합한 거주 환경을 제공했는지 여부를 밝히는 데있다.
고성능 드릴은 여전히 호기심의 10 가지 기기 중 마지막으로 체크 아웃되어 완전히 작동했습니다.

로버는 7 피트 (2.1m) 로봇 암 끝에있는 회전식 충격 드릴을“John Klein”이라는 평평한 암석으로 떨어 뜨 렸습니다. 그녀는 현재 옐로 나이프 만 (Yellowknife Bay)이라는 얕은 유역에서 수고를하고 있으며, 수십억 년 전에 물이 흐르고있는 수많은 에피소드를 목격했습니다.
지상 제어기는 이제 로버에게 6 분의 1 인치 (150 미크론)보다 큰 입자를 걸러내는 스크린을 통해 가루가 많은 바위 같은 물질을 분쇄하고 체질하도록 명령합니다.
그 후 가공 된 화성 분말이 로버 데크 상단에 위치한 3 개의 주입구 포트를 통해 철저한 분석 및 조사를 위해 호기심의 소형화 된 CheMin 및 SAM 분석 실험실에 로봇 팔을 통해 전달 될 때 최고의 테스트가 이루어집니다.

NASA의 JPL (Jet Propulsion Laboratory)의 드릴 코 그너 티브 엔지니어 인 Avi Okon은“우리는 첫 번째 심층 드릴링을 지휘했으며 하드웨어 청소 및 샘플 제거의 목표를 달성하기 위해 암석에서 충분한 재료를 수집했다고 생각합니다. 패서 디나
5/8 인치 (16mm) 너비의 드릴 비트에서 생성 된 암석 테일은 비트의 좁은 홈을 통과 한 후 드릴 챔버 내부로 이동하여 암 툴 터릿의 프로세스 핸들링 메커니즘으로 전달됩니다.
드릴 시스템 엔지니어 인 JPL의 스캇 맥 클로 스키 (Scott McCloskey)는“드릴 비트 어셈블리의 내부 표면을 문지르 기 위해 우리가 획득 한 파우더를 가져다가 가루로 만들 것이다. "그런 다음 우리는 팔을 사용하여 가루를 드릴에서 국자로 옮깁니다. 이것이 수집 된 샘플을 볼 수있는 첫 번째 기회입니다."
재료의 일부는 2011 년 11 월 플로리다 주 케이프 커 내버 럴 (Cape Canaveral)에서 발사되기 전에 지구에서 가져온 미량의 오염 물질 처리실 미로를 씻고 청소하는 데 사용됩니다.

시추 된 암석 호기심은 2011 년에 사망 한 화성 과학 실험실 부 프로젝트 관리자를 기념하여 "존 클라인 (John Klein)"이라고 불립니다.
호기심은 이전에 붉은 행성에 착륙 한 임무를 뛰어 넘는 능력의 비약적인 발전을 나타냅니다. 이 차의 크기는 1 톤 로버로 미국에서 온 10 개의 첨단 과학 장비와 유럽의 협력 업체를 자랑합니다.
1 톤 로봇은 옐로 나이프 만과 글레 넬그 지역을 조사하는 몇 주 동안 계속해서 3 가지 유형의 지질 지형의 교차점에 위치합니다.
그 후, 6 륜 메가 로버는 거의 1 년 동안 그녀의 주요 목적지 인 샤프 산이라는 3 마일 (5km) 고지대의 하류에있는 퇴적층 – 약 6 마일 (6km)에 출발합니다. 떨어져.