대담한 화성 탐사 로버 인 기회는 페달을 금속에 놓고 거의 12 킬로미터 떨어진 분화구로 향합니다. 그러나 미지의 요구는 로버 과학 팀이 시도를하도록 강요하고 있습니다. “우리는 그곳에 도착하지 못할 수도 있지만 과학적으로 올바른 방향으로 가고 있습니다. "노화"로버 (로버 년에 몇 살입니까?)의 경우 막대가 꽤 높아질 수 있습니다. 그러나 아마도 여행이 아니라 목적지 일 것입니다.
로버 프로젝트 매니저 인 존 칼라스 (John Callas)는“이것은 우리가 이전보다 더 대담하고 공격적인 목표입니다. “정말 흥미 롭습니다. 새로운 과학입니다. 이 로봇 탐험가에게는 다음 도전입니다.”
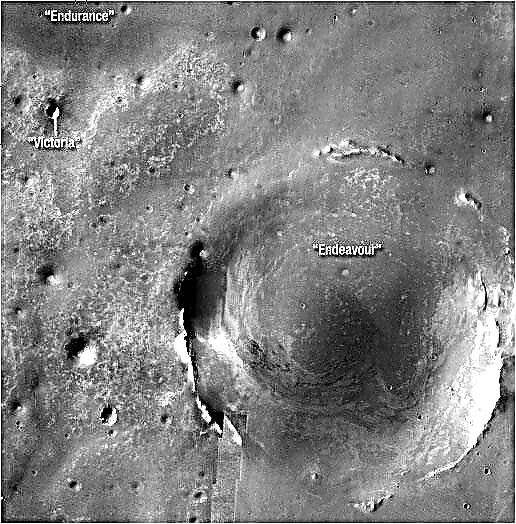
"이 분화구는 우리가 전에 본 것보다 엄청나게 큽니다." Endeavour라는 이름의 분화구는 22 킬로미터 (13.7 마일)입니다. Squyres는“테두리에서 그러한 관점을보고 싶다”고 말했다. “그러나 우리가 그곳에 도착하지 않더라도 남쪽으로 이동할 때 표면의 젊고 어린 암석층에 도달 할 것으로 기대합니다. 또한 남쪽에는 큰 분화구가있어 평원에서 조사하고 싶은 자갈의 근원이라고 생각합니다. 일부 자갈은 기회가 볼 수있는 것보다 더 깊은 층의 샘플이며, 남쪽으로 향할수록 더 많은 자갈을 찾을 것으로 기대합니다.”
로버 팀은 기회가 엔데버 분화구를 향해 매일 약 110 야드를 이동할 수 있다고 추정합니다. 그 속도에도 불구하고 여행은 2 년이 걸릴 수 있습니다. 그러나 왜 가서 로버가 얼마나 오래 지속될 수 있는지 보시겠습니까?

스피릿과 같은 기회는 화성에서의 예상 수명을 훨씬 초과했으며 분화구에 도달 할 정도로 오래 작동하지 않을 수 있습니다. 그러나 2005 년과 2006 년에 빅토리아 분화구를 향한 4 마일 운전 중에는 이용할 수없는 두 가지 새로운 자원이이 새로운 여행을 도울 것으로 예상됩니다.
하나는 NASA의 Mars Reconnaissance Orbiter의 HiRISE (High Resolution Imaging Science Experiment) 카메라를 사용하여 로버 자체보다 작은 디테일의 궤도에서 촬영 한 것입니다. 2006 년 Red Planet에 도착했습니다.
Callas는“HiRISE를 통해 경로를 따라 로버 규모로 주행 경로와 잠재적 위험을 식별 할 수 있습니다. "이것은 NASA의 화성 탐사 프로그램의 여러 부분이 어떻게 서로를 강화하는지 보여주는 훌륭한 예입니다."
또한 기회는 이제 화성 평원을 가로 질러 운전하기에 더 나은 "두뇌"를 갖습니다. 2006 년 기회와 정신에 업 링크 된 새로운 버전의 비행 소프트웨어는 노선을 자율적으로 선택하고 모래 언덕과 같은 위험을 피할 수있는 능력을 향상시킵니다.
기회는 화성에 첫 해 동안, 땅에 떨어진 지역이 먼 과거에 지표수와 지하수를 가지고 있다는 지질 학적 증거를 발견했습니다. 로버의 탐사 이후 환경이 시간이 지남에 따라 어떻게 변화했는지에 대한 정보가 추가되었습니다. 이미 검사 한 레이어의 위 또는 아래에서 암석 레이어를 찾으면 나중에 또는 이전에 창을 추가합니다.
출처 : JPL