우주 로봇이 코스를 떠날 때 미션 플래너는 정말로 그것을 싫어합니다. 요즘 우리는 성공 가능성을 높이고 있지만 (화성 호기심의 7 분의 공포를 기억하십니까?) 한 우주 기관은 착륙을 더욱 정확하게 할 수있는 멋진 시뮬레이터를 소매에 올려 놓았습니다.
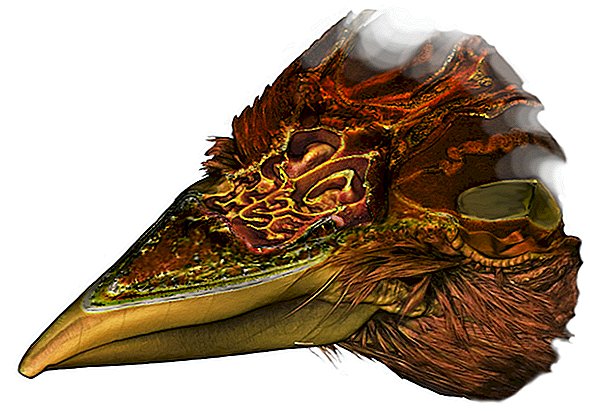
위에 표시된 바와 같이,이 소프트웨어 및 하드웨어 (유럽 우주국에서 테스트 한)는 프랑스 항공 우주 센터 ONERA에 깊은 인상을 주었으며, 최근 공무원들은이 연구에 대한 공로를 인정했습니다.
"파리에서 관광객이라면 에펠 탑, 개선문 또는 노트르담 대성당과 같은 유명한 랜드 마크로가는 길을 찾아지도에서 내 위치를 찾는 데 도움을 줄 수 있습니다."라고 박사 제프 델라 우네 (Jeff Delaune) 박사는 말했습니다. . 연구를 수행하는 학생.
"우주선의 눈으로 볼 수있는 카메라로 충분한 표면 랜드 마크가있는 공간에서 동일한 프로세스가 반복되면 시각적 정보를 컴퓨터에 탑재 된지도와 자동으로 비교하여 위치를 정확하게 정확하게 확인할 수 있습니다."

랜드 마크 클로즈업은 멀리 떨어져있는 것처럼 보일 수 있기 때문에이 시스템에는이 문제를 해결하는 방법이 있습니다.
이른바 '관성 및 광학 내비게이션 착륙 (LION) 시스템'은 우주선의 카메라에서 생성 된 실시간 이미지를 가져와 이전 미션의지도와 3D 디지털 표면 모델과 비교합니다.
LION은 거대한 분화구이든 작은 볼더이든, 보이는 모든 지점의 상대적인 크기를 고려할 수 있습니다.
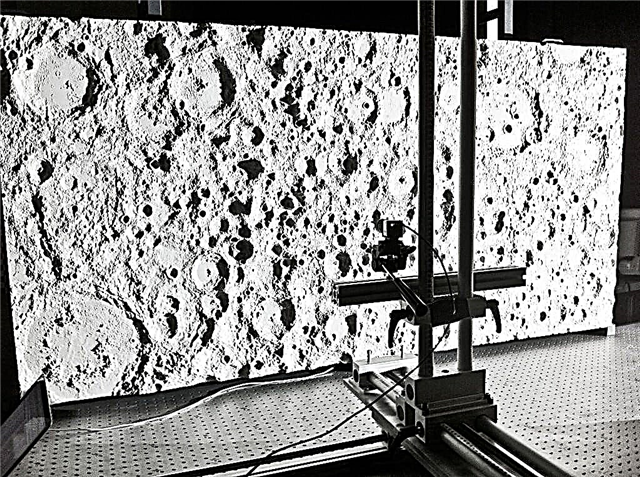
네덜란드 Noordwijk에있는 ESA의 제어 하드웨어 연구소에서 공무원들은 고해상도 달지도를 통해 시스템을 테스트했습니다.
이것은 단지 시험일 뿐이며이 시스템이 공간을 준비하기 전에 갈 수있는 방법이 여전히 있지만 ESA는 시뮬레이션 된 위치 정확도가 1.86 마일 고도에서 164 피트 (또는 3 킬로미터 고도에서 50 미터)보다 낫다고 말했다.
아, 그리고 지금까지 시뮬레이션 된 달 지형에서만 테스트되었지만 동일한 시스템이 로봇이 소행성에 착륙하거나 화성에 착륙하는 데 도움이 될 수 있습니다.
이 시스템이 처음으로 행성 간 승차감을 낼 때는 아무 말도하지 않지만, 들로네는이 연구를 무인 항공기와 같은 지상 문제에 적용하기 위해 노력하고 있습니다.
ESA 웹 사이트에서 테스트에 대한 자세한 내용을 확인하십시오.
출처 : ESA