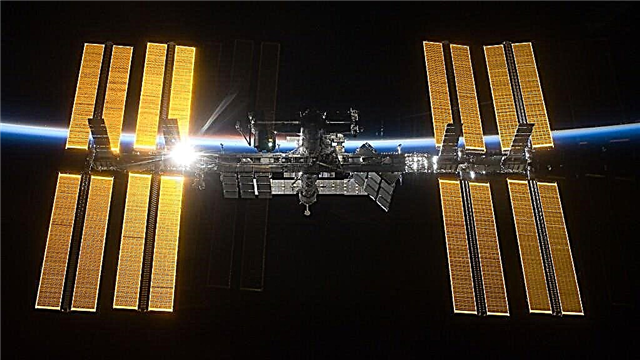
ISS (International Space Station)에서 수행 된 새로운 최초의 로봇 공학 연구를 고가의 궤도 우주 위성의 최종 수리 및 급유에 성공적으로 적용함으로써 미국과 캐나다 엔지니어로 구성된 팀이 큰 첫 발을 내딛었습니다. 정부와 상업용 우주 부문의 비용을 하루 수십억 달러 절감 할 수있는 잠재력을 가지고 있습니다.
두 나라에서 온 기쁜 연구자들은“그렇습니다!” – RRM (Robotic Reueling Mission) 실험을 성공적으로 사용한 후 ISS 외부의 기술 테스트 베드로 볼트 공간의 원격 제어 로봇이 매우 정밀한 모션 제어가 필요한 섬세한 작업 작업을 수행 할 수 있음을 입증합니다. 혁신적인 로봇 공학 실험은 이미 지구 궤도에 있지 않은 인공위성의 작동 수명을 연장시킬 수 있습니다.
스페이스 매거진과의 독점 인터뷰에서 저스틴 캐시디 (Justin Cassidy)는“RRM에 대한 수개월 간의 전문적이고 개인적인 시간을 RRM에 바친 후에는 RRM 도구에서 첫 번째 비디오 스트림을 볼 수있게 된 것은 매우 감정적 인 서두르고 안심이되었습니다. 캐시디는 메릴랜드 주 그린벨트에있는 NASA Goddard Spaceflight Center의 RRM 하드웨어 관리자입니다.

그리고 RRM 팀은 이미 우주에서 로봇 공학 응용을 변형시킬 수있는 실제 위성 급유를 시뮬레이션하기 위해 유체의 높은 전송을 포함하여 올 여름부터 시작되는 실험에 대해 더욱 야심 찬 후속 조치를 수행 할 계획을 가지고 있습니다.
스테이션의 모든 로봇 작업은 지상에서 비행 컨트롤러에 의해 원격 제어되었습니다. 원격 제어 및 로봇 공학의 목적은 ISS 인간 승무원을 자유롭게하여 다른 중요한 활동을 수행하고 현장 인간의 사고와 개입이 필요한 과학 실험을 수행 할 수 있도록하는 것입니다.

엔지니어는 3 월 7 일부터 9 일까지 3 일 동안 NASA의 RRM (Robotic Reueling Mission) 실험과 CSA (Canadian Space Agency)의 로봇 "핸디맨"– Dextre 로봇간에 공동 작업을 수행했습니다. Dextre는 공식적으로 SPDM 또는 특수 목적 Dexterous Manipulator라고 불립니다.
첫 날, 지구의 로봇 운영자는 우주 정거장의 캐나다 내장 로봇 팔 (SSRMS)을 사용하여 12 피트 (3.7 미터) 길이의 Dextre“핸디맨”을 RRM 실험에 원격으로 조종했습니다.
기술적으로 "OTCM"으로 알려진 Dextre의 "손"은 RRM 장치 내부에있는 세 가지 다른 특수 위성 작업 도구를 파악하고 검사했습니다. 세이프티 캡 툴, 와이어 커터 및 블랭킷 조작 툴 및 다기능 툴의 종합적인 기계적 및 전기적 평가 결과 세 가지 툴이 모두 완벽하게 작동하는 것으로 나타났습니다.

“우리 팀은 캐나다“Dextre”로봇의“손”을 RRM 안전 캡 도구 (SCT)에 기계적으로 걸었습니다. RRM SCT는 Dextre OTCM 핸드의 비디오 기능을 사용한 최초의 온 궤도 장치입니다.”라고 Cassidy는 설명했습니다.
“공구 컨트롤러는 툴 운영 초기에 OTCM의 전기 엄 빌리 컬을 기계적으로 구동하여 SCT의 필수 전자 장치 상자와 결합했습니다. 이 인터페이스에 전원이 공급되면 우리 팀은 Goddard의 대형 스크린 TV에서 SCT의 "첫 번째 표시 등"비디오가 RRM 적재 베이 내에서 도구의 장면을 보여 주었다는 것을 알 수있었습니다 (사진 참조).

“우리 팀은“그래!” 이 성공적인 전기 기능 시스템 점검을 칭찬했습니다.”
그런 다음 Dextre는 RRM 모듈 외부에있는 다양한 대표적인 가스 피팅, 밸브, 와이어 및 씰을 얼마나 잘 조작 할 수 있는지 테스트하기위한 여러 가지 작업을 수행했습니다. 이 회사는 안전 발사 잠금 장치를 출시했으며 강철로 만든 두 개의 매우 얇은 위성 잠금 와이어를 세 심하게 절단했으며 직경은 2,000 분의 1 인치 (0.5mm)입니다.
“와이어 커팅 이벤트는 몇 분 밖에 걸리지 않았습니다. 그러나 두 와이어 커팅 작업에는 약 6 시간의 조정 된 안전한 로봇 작업이 필요했습니다. 잠금 와이어는 비행 전에 Ambient Cap과 T-Valve의 인터페이스에서지면에 배선, 꼬이고 묶여있었습니다.”라고 Cassidy는 말했습니다.
이 RRM 실습은 대규모 궤도 전초 기지의 로봇 유지 관리 기능을 능가하는 기능의 주요 확장 인 ISS의 기술 연구 및 개발 프로젝트에 Dextre 로봇이 처음 사용 된 사례입니다.
비디오 캡션 : Dextre의 로봇 급유 임무 : 2 일차. 2012 년 3 월 8 일 Dextre의 가장 까다로운 임무의 두 번째 날은 로봇 핸디가 3 가지 과제를 완료하면서 성공적으로 마무리되었습니다. 크레딧 : NASA / CSA

3 일 동안의 작업은 약 43 시간이 걸렸으며 예상보다 명목에 가깝기 때문에 예상보다 다소 빠르게 진행되었습니다.
NASA Goddard의 RRM 운영 책임자 / 시스템 엔지니어 인 Charles Bacon은 Space Magazine의“1 일과 2 일은 약 18 시간을 뛰었습니다. “모든 작업을 조기에 완료 한 후 3 일에는 약 7 시간이 걸렸습니다. 3 일 동안 모두 18 시간을 기준으로 팀이 2 교대 근무했습니다. 시간이 예상대로 됐고, 마지막 날 일찍 시작한 이후로 조금 더 나아졌습니다.”

Cassidy는“지난 몇 달 동안 우리 팀은 RRM 온 궤도 데모를위한 무대를 마련해 왔습니다. "시어터 프로덕션과 마찬가지로 개발 지원을 제공하고 온 궤도 RRM 작업의 일부로 계속 활동하는 많은 엔지니어들이 있습니다."
“준비, 제공, 설치 및 운영에서 RRM의 각 단계마다 많은 다양한 팀이 RRM을 실현하기 위해 노력한 엄청난 노력으로 인해 뒤떨어졌습니다. NASA의 Goddard 우주 비행 센터의 위성 서비스 기능 사무소는 Johnson Space Center, Kennedy Space Center (KSC), Marshall Space Flight Center 및 캐나다 우주 기관 제어 센터와 협력하여 퀘벡 주 세인트 휴 버트의 캐나다 우주국 제어 센터와 협력했습니다.”
Cassidy는“Dextre를 사용한 국제 우주 정거장 (ISS)에서 현재까지 RRM 운영의 성공은 NASA의 많은 조직과 파트너의 우수성을 입증하는 것”이라고 설명했습니다.
3 일간의“가스 피팅 제거 작업”은 로봇이 오작동하는 위성을 로봇 방식으로 수정하고 명목상 작동하는 위성에 급유하여 수년 동안 성능 수명을 희망적으로 연장하는 데 필수적인 기술을 연습하기위한 초기 시뮬레이션이었습니다.
지상 기술자는 피팅과 밸브를 사용하여 발사 전에 모든 필수 유체, 가스 및 연료를 위성 저장 탱크에 적재 한 다음 밀봉, 덮고 다시는 접근하지 않습니다.
메릴랜드 주 그린벨트에있는 NASA의 Goddard 우주 비행 센터에서 위성 서비스 기능 사무소 (SSCO)의 부국장 Frank Cepollina는“유용한 기술 테스트 베드로서의 우주 정거장의 영향은 과장 될 수 없습니다.
“새 위성 서비스 기술은 몇 년이 아닌 몇 달 안에 실제 우주 환경에서 시연 될 것입니다. 이것은 크다. 우주 기술 발전의 실제 진전을 나타냅니다.”
올해에 예정된 4 개의 추가 RRM 실험은 원격 제어 로봇이 공간에서 장벽을 제거하고 빈 위성 가스 탱크에 연료를 공급하는 기능을 보여 주므로 값 비싼 하드웨어가 궤도 폐차장에 조기에 가입하는 것을 막을 수 있습니다.
향후 RRM 운영시기는 까다로울 수 있으며 우주 유영, 유지 보수 활동 및 과학 실험과 같은 다른 많은 진행중인 ISS 운영뿐만 아니라 접안 및 / 또는 꾸준한 하역과 같은 다른 많은 진행중인 ISS 운영을 위해 많이 예약 된 Dextre 및 SSRMS 팔의 가용성에 달려 있습니다. Progress, ATV, HTV, Dragon 및 Cygnus와 같은 중요한화물 재 공급 선박의 흐름.
유연성은 모든 ISS 작업의 핵심입니다. 그리고 스테이션 승무원은 RRM에 관여하지 않지만 그들의 활동은 가능할 것입니다.
Bacon은“승무원 자체가 운영을 위해 Dextre에 의존하지는 않지만, 승무원이 할 수 있거나 할 수없는 것에 간접적으로 영향을 줄 수 있습니다. 예를 들어 RRM 작업 중에 승무원이 해당 운동이 Dextre의 움직임에 미치는 영향 때문에 특정 운동을 수행 할 수 없습니다.”
다음 RMS 작업 목록 – 보류중인 ISS 일정 제약 조건은 다음과 같습니다.
* 급유 (2012 년 여름) – Dextre는 오늘날 위성에서 일반적으로 사용되는 것과 유사한 연료 밸브를 개방 한 후 정교한 로봇 식 연료 호스를 통해 액체 에탄올을 그 안에 옮길 것입니다.
열 담요 조작 (TBD 2012)-Dextre는 열 담요 테이프를 자르고 열 담요를 뒤로 접어 내용물을 공개합니다.
* 스크류 (패스너) 제거 (TBD 2012)-Dextre는 위성 볼트 (패스너)를 로봇 식으로 풀어줍니다.
전기 캡 제거 (TBD 2012)-Dextre는 일반적으로 위성의 전기 콘센트를 덮는 캡을 제거합니다.
RRM은 NASA의 30 년 긴 셔틀 프로그램의 최종 셔틀 미션 (STS-135)을 통해 2011 년 7 월 우주 왕복선 아틀란티스의 화물선 내부에서 궤도로 이동 한 후 우주 비행사 우주 비행사들에 의해 ISS 골격 트러스의 외부 작업 플랫폼에 장착되었습니다. 이 프로젝트는 NASA와 CSA의 공동 노력입니다.
“이것은 성공의 전부입니다. RRM을 통해 우리는 미래의 로봇 탐사 및 위성 서비스를위한 길을 개척하고 있습니다.”라고 Cassidy는 결론을 내 렸습니다.

…….
3 월 24 일 (토) : 뉴저지 천문 협회, 뉴저지 주 보리 주립 공원, 830 PM에있는 Ken Kremer의 무료 강의. 주제 : 아틀란티스, 미국의 종말 셔틀 프로그램, RRM, Orion, SpaceX, CST-100 및 NASA 인간 및 로봇 우주 비행의 미래