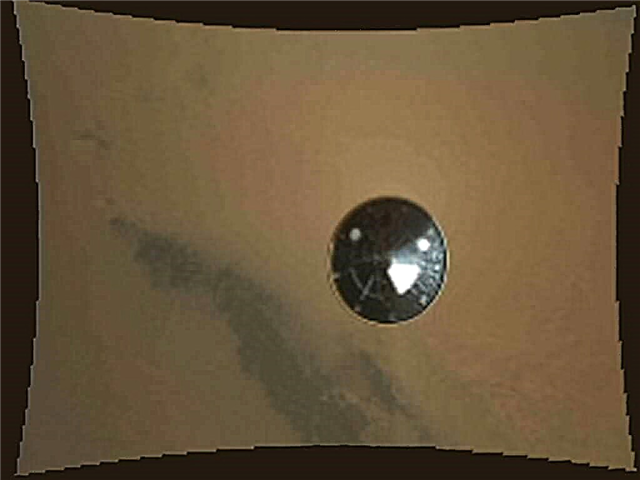
이미지 캡션 : 호기심 열 차폐는이 이미지에서 MARDI 카메라의 호기심과 스카이 크레인 하강 단계에서 떨어집니다.
아래 비디오를보십시오. 크레딧 : NASA / JPL / MSSS
NASA의 호기심 화성 과학 연구소 (MSL)는 완벽하지만 결코 사용하지 않은 로켓 구동 식 스카이 크레인 하강 단계, 극적인 영화- 플 런지 이미지가 MARDI에 의해 기록되고있는 것처럼 Mars Descent Imager 카메라는 로버의 배꼽에 위치하고 아래쪽을 향했습니다.
첫 번째 저해상도 MARDI 이미지와 비디오 (위와 아래)는 착륙 직후 몇 시간 동안 지구로 빔으로 돌아와서 착륙 후 호기심과 MARDI를 노출시키기 위해 느슨하게 튀어 나온 후 열 차폐 모멘트의 분사를 명확하게 보여줍니다.
Malin Space Systems의 MARDI Principal Investigator 인 Mike Malin은 오늘 착륙 후 뉴스 브리핑 (8 월 6 일)에서“열 차폐가 터치 다운에서 약 2 분 30 초 후에 떨어지는 것을 볼 수 있습니다. "열 차폐는 이미지에서 약 16 미터 (50 피트) 떨어져 있으며 4.5 미터 (15 피트)입니다."
“게일 분화구 (Gale Crater)에 와서 매우 기쁩니다.
“지금까지 약 297 개의 썸네일 이미지 (192 x 144 픽셀)를 받아 스톱 모션 비디오를 만들었습니다. MADRI는 초당 4 프레임으로 이미지를 수집하고있었습니다. 마지막 프레임에서 로켓 엔진에 먼지가 튀어 나오는 것을 볼 수 있습니다.”
호기심은 8 월 6 일 오후 1시 32 분, EDT (오후 11시 32 분, PDT 8 월 5 일, PDT), 게일 분화구 내부에서 3 마일 (5km), 지름 154km 인 산기슭 근처에있었습니다.
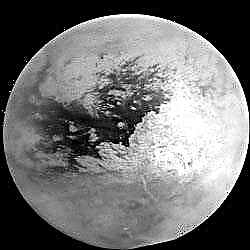
비디오 캡션 : Curiosity Mars Descent Imager (MARDI)는 로버의 강하를 붉은 행성 표면으로 포착했습니다. 기기는 열 차폐 분리에서지면으로 4fps 비디오를 촬영했습니다. 크레딧 : NASA / JPL / MSSS
샌디에고에있는 Malin Space Systems의 Mars Science Lab 임무 이미징 과학자 Mike Malin은“지금까지받은 이미지 시퀀스는 호기심이 예상대로 표면에 매우 흥미 진진한 라이딩을 가졌음을 나타냅니다. “그러나 현재와 같이 극적인 것은 그것들을 얻는 것이 실제로 다른 세계적으로 중요합니다. 이 이미지는 미션 과학자들이 로버의 주변 환경, 로버 드라이버가 표면을 가로 지르는 미래의 드라이브를 계획하는 데 도움을 줄뿐만 아니라 엔지니어가 화성 또는 다른 세계를위한 다가오는 착륙 시스템을 설계하는 데 도움이 될 것입니다.”
Malin은“아폴로 11 호의 달빛 필름이 달에 착륙 할 때와 비교할 때 좋은 비교입니다.
1500 만 개 이상의 저해상도 및 고해상도 MARDI 이미지 (1600 x 1200 픽셀)가 전체 프레임 애니메이션을 만들기 위해 다음 몇 주에 걸쳐 다시 전송 될 것이며 탐험 역사상 행성 착륙에 대한 가장 완벽하고 극적인 이미지를 제공 할 것입니다.
이 팀은 MARDI 및 MRO HiRISE 이미지와 Hazcam 이미지를 일치시켜 호기심의 위치를 약 1 미터 이내로 "Minin"으로 결정할 수있었습니다.
MSL의 미션 매니저 인 제니퍼 트 로스 퍼 (Jennifer Trospher)
다음 단계는 고 이득 안테나 (HGA)를 배치하고, 고해상도 카메라로 마스트를 높이고, 로버가 표면 작동 모드로 전환됨에 따라 과학 장비뿐만 아니라 기계 및 전기 시스템을 계속 확인하는 것입니다.