다리 (예, 다리)는 다음 SpaceX Dragon 비행의 매니페스트에 있습니다. 상업용 우주선은 3 월 16 일에 로보트 너트 2의 부속물이 날아 와서 휴머노이드가 역을 자유롭게 이동할 수있게 될 것으로 예상된다. 6 월에 몇 가지 초기 테스트가 끝나면 R2의 첫 단계가 시작되어 인간 우주 비행의 새로운 시대가 열렸습니다.
R2의 흥미로운 점은 우주 정거장에서 우주 비행사를 위해 간단한 작업을 수행 할 수있을뿐만 아니라 장기적으로 "외부"로 우주 유영을 할 수 있다는 것입니다. 방외 활동은 최근 우주복 누출로 인해 우리에게 상기시킨 것처럼 외부 활동이 가장 위험한 일 중 하나이기 때문에 우주 비행사에게 위험을 크게 줄입니다.
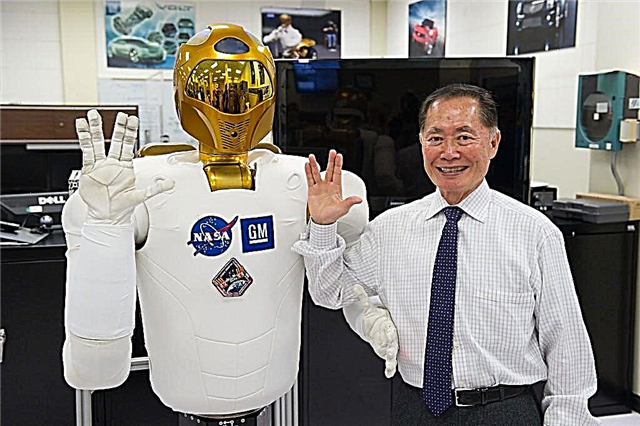
Robonaut는 설치시 9 피트의“완전히 확장 된 다리 스팬”을 갖게됩니다 (스플릿을보고 싶지는 않습니다). 발 대신에, 7 개의 조인트가있는 각 다리에는 그립을 위해 물건을 잡을 수있는 일종의 클램프 인 "엔드 이펙터"가 있습니다. Canadarm 로봇 팔에 사용 된 기술과 비슷하며 Canadarm과 마찬가지로 컨트롤러가 파악할 수있는 비전 시스템이 있습니다.

로봇은 2011 년 2 월에 처음 도착했으며 (주로 묶여있는 동안) 우주 비행사 인 댄 버 뱅크 (Dan Burbank)와 악수 (2012 년 우주 최초의 인간형 인간)와 같은 활동 목록을 작성했습니다. 회전 노브 및 플립 스위치와 같은 기능을 수행합니다. 우주 비행사 인 톰 마쉬 번 (Tom Marshburn)은 2012-13 년 원정대 34/35에서 원격 조종을 통해 로보 노트 2가 자유롭게 떠 다니는 물체를 잡을 수있게했습니다.
결국 NASA는 스테이션 밖에서 로봇을 사용할 것으로 예상하지만 Robonaut 2의 상체에 대한 더 많은 업그레이드가 먼저 필요합니다. 그 후 로봇은 우주 유영의 보충으로 사용될 수 있는데, 이는 우주에서 인간이하는 가장 위험한 활동 중 하나입니다.
NASA는 지구에 가까워서이 기술에는 신체 장애가있는 사람들을 돕기 위해 개발 된 외골격과 같은 품목을위한 응용 프로그램이 있다고 말합니다.
출처 : NASA