스탠포드 대학교의 한 연구원은 소행성, 원형 비행기, 작은 달 등 태양계에 존재하는 많은 작은 세계에서 태양계에 대해 아직 알지 못 했으므로 한 번에 탐사 할 수있는 로버 / 우주 하이브리드의 떼를 내놓고 있다고 제안했습니다.
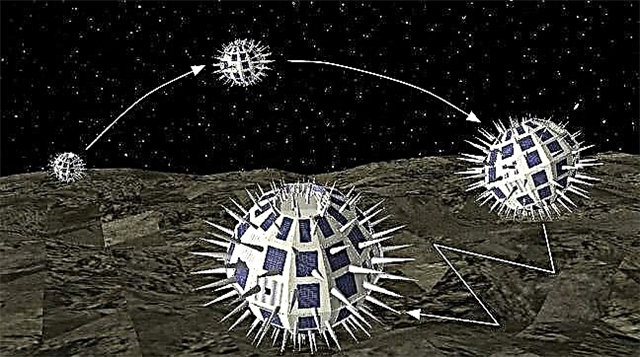
스탠포드 대학의 항공 우주 및 조교수 인 마르코 파 보네 (Marco Pavone)는 JPL의 연구 제휴사 인 NASA의 혁신적인 고급 개념 (NIAC) 프로그램에 따라 화성 위성과 같은 작은 세계에 배치 된 소형 구형 로봇을 볼 수있는 개념을 개발하고 있습니다. 그리고 데이모스 (Dimos)는 저 중력을 이용하여 문자 그대로 도약과 경계를 탐험 할 수 있습니다.
이러한 임무의 제안 된 저렴한 비용으로 인해, 다수의 우주선이 전세계에 흩어져서, 커버 될 수있는 영역을 증가시키고 다양한 표면을 탐험 할 수있게한다. 또한 전체 임무에 실패한 한 우주선이 타협되지 않았습니다.
이 개념은 우주선의 수를 곱하고 비용을 절감한다는 점을 제외하고 NASA가 과거에 화성 탐사선에서했던 것과 유사합니다.
로봇은“어머니”우주선에서 배치되어 저 질량 세계를 가로 질러 착륙, 텀블링, 호핑 및 보관시 작동합니다.
Pavone의 하이브리드 로버는 이러한 세계의 표면에서 우리의 첫 견해를 제공 할뿐만 아니라 미래의보다 심층적 인 탐험을 준비하는 데 도움이 될 수 있습니다.
Pavone은“소체의 체계적인 탐사는 태양계의 기원과 초기 진화를 풀고 천문학적 관련성을 평가하는 데 도움이 될 것입니다. 또한, 지구를 넘어 미래의 인간 임무를 고려하여 작은 신체의 자원 잠재력을 평가할 수 있습니다.”
NASA의 최고 기술자 사무실에서 자세한 내용을 확인하십시오.
마르코 파 보네의 사진 제공