다음은 저의 새로운 저서 "우주에서 온 놀라운 이야기 : 우주의 비하인드 스토리가 우주에 대한 우리의 관점을 바꾸는 미션을보십시오"에서 발췌 한 마지막 내용입니다. 이 책은 현재의 NASA 로봇 임무 몇 가지를 내부적으로 살펴본 것입니다.이 발췌문은 우주 잡지, 2 장, "호기심으로 움직이는 화성"의 3 부 중 3 부입니다. 여기 1 부, 2 부를 읽을 수 있습니다. 이 책은 인쇄본 또는 전자 책 (Kindle 또는 Nook) Amazon 및 Barnes & Noble로 제공됩니다.
화성 로버를 운전하는 방법
호기심은 화성 표면을 가로 질러 어디로 어떻게 주행해야하는지 어떻게 알 수 있습니까? 리모컨 장난감이나 비디오 게임에 사용되는 것과 유사한 조이스틱을 사용하여 JPL 엔지니어를 구상 할 수 있습니다. 그러나 RC 운전 또는 게임과 달리 Mars 로버 운전자는 로버가 어디로 가는지 확인할 수있는 즉각적인 시각적 입력 또는 비디오 화면이 없습니다. 착륙과 마찬가지로 로버에게 명령이 전송 될 때와 화성에서 명령이 수신 될 때까지 시간이 항상 지연됩니다.
로버 드라이버 팀을 이끌고있는 존 마이클 모루 키안 (John Michael Morookian)은“시간 지연으로 인해 실시간 인터랙티브 한 방식으로 운전하지는 않습니다.
Morookian과 그의 팀의 실제 직책은 'Rover Planners'이며, 이들이하는 일을 정확하게 설명합니다. 로버 자체를 '운전'하는 대신; 그들은 미리 경로를 계획하고, 전문 소프트웨어를 프로그래밍하고, 지침을 호기심에 업로드합니다.
"우리는 주변의 로버로 촬영 한 이미지를 사용합니다"라고 Morookian은 말했습니다. “우리는 지형 특성에 대한 세부 정보를 제공하는 MastCam의 고해상도 컬러 이미지로 지원되는 Hazcams (위험 회피 카메라)의 이미지와 함께 4 개의 흑백 내비게이션 카메라의 스테레오 이미지 세트를 보유하고 있습니다. 현장의 암석 및 광물 유형에 대한 단서가 있습니다. 이것은 과학자들에게 흥미로운 구조를 식별하는 데 도움이됩니다.”
사용 가능한 모든 데이터를 사용하여 RSVP (Rover Sequencing and Visualization Program)라는 특수 소프트웨어를 사용하여 지형의 3 차원 시각화를 만들 수 있습니다.
Morookian은“이것은 기본적으로 화성 시뮬레이터이며 장면의 파노라마에 시뮬레이션 된 호기심을 넣어 로버가 경로를 통과하는 방법을 시각화합니다. “또한 스테레오 안경을 착용하면 마치 마치 마치 마치 로버가있는 것처럼 3 차원으로 장면을 볼 수 있습니다.
가상 현실에서 로버 운전자는 장면과 로버를 조작하여 경로가 가장 좋은 경로와 피해야 할 영역을 테스트 할 수 있습니다. 그곳에서 그들은 실제 실수가 화성에 안전하게 남아있는 동안 모든 실수를 할 수 있습니다 (사구에 갇히고, 로버를 기울이고, 큰 바위에 부딪 히고, 벼랑을 몰아냅니다) 운전 순서를 완료 할 수 있습니다.
또한 과학자들은 흥미로운 기능에 대한 이미지를 검토하고 경로를 정의하기 위해 로버 플래너와상의합니다. 그런 다음 해당 경로를 따라 지점 A에서 지점 B로 호기심을 얻는 데 필요한 자세한 명령을 작성합니다.”라고 Morookian은 말했습니다. "로봇 팔을 사용하여 로버가 현장과 접촉하도록 지시하는 데 필요한 명령을 통합 할 수도 있습니다."

그래서 매일 밤 로버는 원자력 발전기로 배터리를 재충전하기 위해 8 시간 동안 셧다운하라는 명령을 받았습니다. 그러나 첫 번째 호기심은 지형 사진과 과학 정보를 포함하여 데이터를 지구로 보냅니다. 지구상에서 로버 플래너는 해당 데이터를 수집하고 계획 작업을 수행하며 소프트웨어 프로그래밍을 완료하고 정보를 화성으로 다시 보냅니다. 그런 다음 호기심이 일어나서 지침을 다운로드하고 작동하도록 설정합니다. 그리고주기가 반복됩니다.
호기심에는 또한 팀이 아직 이미지에서 보지 못한 영역을 로버가 통과 할 수있는 자동 탐색 기능이 있습니다. 따라서 AutoNav는 잠재적 위험을 감지하면서 언덕을 넘어 반대편으로 미지의 영역으로 이동할 수 있습니다.
"우리는 계산 비용이 많이 들기 때문에 너무 자주 사용하지 않습니다. 즉, 로버가 해당 모드에서 작동하는 데 훨씬 오래 걸립니다."라고 Morookian은 말했습니다. "우리는 종종 다음 날에 와서 이미지를보고 우리가 볼 수있는 한 운전하는 것이 더 나은 거래라는 것을 알게되었습니다."

Morookian은 JPL의 로버 계획 팀이 사용하는 다양한 방을 보여 주면서 여러 시간 단위로 어떻게 운영해야하는지 설명했습니다.
"우리는 매일 경로 계획을 가지고있을뿐만 아니라 Mars Reconnaissance Orbiter에있는 HiRISE 카메라의 궤도 이미지를 사용하여 장거리 전략 계획을 세우고 궤도에서 볼 수있는 기능을 기반으로 경로를 선택합니다. 우리 팀은 전략적으로 일하며 최상의 경로를 정의하기 위해 수 개월을 기대합니다.”
Supra-Tactical이라는 또 다른 프로세스는 다음 주에 나올 것입니다. 여기에는 과학 계획가가 로버가 단기적으로 수행 할 활동 유형을 관리하고 수정하는 과정이 포함됩니다. 또한 팀원 중 누구도 더 이상 화성 시간에 살지 않기 때문에 금요일에 로버 플래너는 며칠 동안 계획을 세웁니다.
“우리는 주말에 일하지 않기 때문에 금요일 계획에는 여러 가지 활동이 포함되어 있습니다.”라고 Morookian은 말했습니다. "병렬 팀 2 명은 로버가 운전할 날과 로봇 팔이나 다른 기기와 같은 다른 활동을 할 날을 결정합니다."
주말 동안 로버에서 내려 오는 데이터는 모니터링되지만 문제가있는 경우 더 자세한 평가를 수행하기 위해 팀이 호출됩니다. 모루 키안은 긴급 주말 팀에 여러 번 참여해야했지만 지금까지 심각한 문제는 없었습니다. "그러나 그것은 우리를 우리의 발가락에 유지시켜줍니다."
로버는 로버 데크의 전체 기울기 양과 바퀴의 서스펜션 시스템의 관절에 대한 여러 가지 반응성 안전 점검 기능을 갖추고 있으므로 로버가 너무 큰 물체를지나 가면 자동으로 정지합니다.
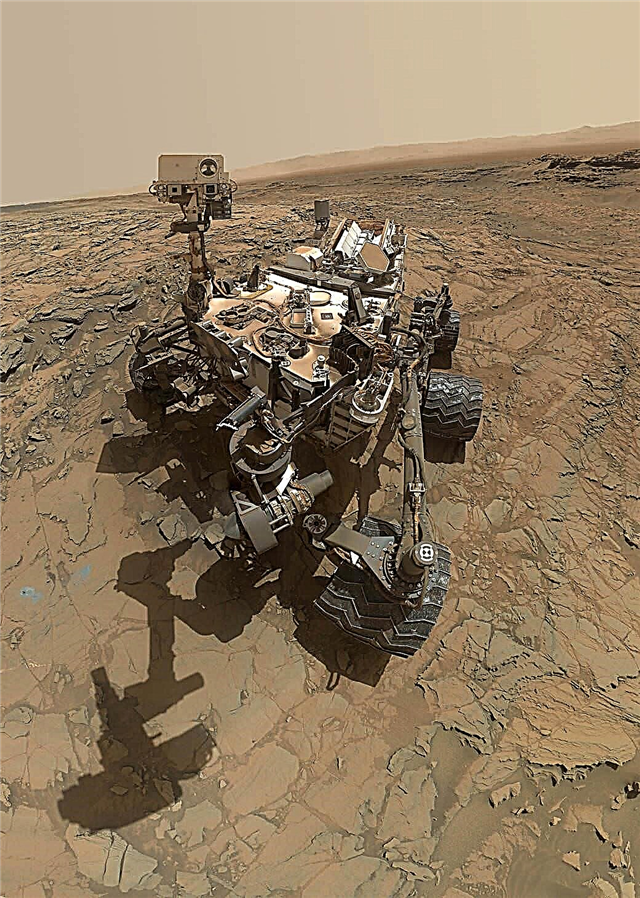
호기심은 속도를 위해 만들어지지 않았습니다. 하루에 최대 200 미터 (660 피트)까지 이동하도록 설계되었지만 Sol에서는 그렇게 멀리 이동하지 않습니다. 2016 년 초까지 로버는 화성 표면을 가로 질러 총 약 12km를 주행했습니다.

호기심이 얼마나 멀리 이동했는지 확인할 수있는 몇 가지 방법이 있지만 가장 정확한 측정을 '시각적 주행 거리 측정'이라고합니다. 호기심은 모스 부호 문자 모양의 바퀴에 구멍을 뚫어 'JPL'을 표시합니다. 화성의 토양을 가로 지르는 로버의 과학 및 엔지니어링 팀.
Morookian은“시각적 주행 거리 측정은 드라이브에서 대략 1 미터마다 수집 된 가장 최근의 스테레오 이미지 쌍을 비교하여 작동합니다. “두 장면 사이의 3 차원 공간에서 카메라 (및 로버)가 어떻게 변환되고 회전했는지 측정 할 수 있도록 장면의 개별 기능이 일치 및 추적되며, 호기심이 얼마나 먼지 알려줍니다 ”
로버 트랙을주의 깊게 검사하면 휠의 트랙션 유형과 미끄러운 경우 (예 : 높은 경사 또는 모래지면으로) 확인할 수 있습니다.
불행히도, 호기심은 이제 바퀴에 새로운 구멍이 생겼습니다.
로버 문제
Morookian과 프로젝트 과학자 Ashwin Vasavada는 전반적으로 (이미 미션까지) 호기심은 상당히 건전한 로버라는 안도감과 만족을 표명했습니다. 전체 과학 페이로드는 현재 거의 모든 기능을 수행하고 있습니다. 그러나 엔지니어링 팀은 몇 가지 문제를 주시합니다.
Vasavada는“sol 400 주변에서 바퀴가 예상보다 빨리 마모되고 있음을 깨달았습니다.

그리고 마모는 단지 작은 구멍으로 구성되지 않았습니다. 팀은 펑크와 심한 눈물을보기 시작했습니다. 엔지니어들은 그 시간 동안 로버가 운전하는 딱딱하고 울퉁불퉁 한 바위에 의해 구멍이 만들어지고 있음을 깨달았습니다.
Vasavada는“우리는 피해를 입은 '뾰족한'암석을 완전히 기대하지는 않았습니다. “우리는 또한 몇 가지 테스트를 수행하여 한 바퀴가 다른 바퀴를 어떻게 바위에 밀어 넣어 손상을 악화시킬 수 있는지 확인했습니다. 우리는 이제 더 신중하게 운전하고 과거만큼 오래 운전하지 않습니다. 우리는보다 수용 가능한 속도로 피해를 줄였습니다.”
Curiosity의 소프트웨어는 문제를 인식하고 더 많은 활동과 전화를 허용하지 않기 때문에 미션 초반에 Curiosity의 컴퓨터는 여러 번 '안전 모드'로 전환되었습니다.
특수 오류 방지 소프트웨어는 모듈과 계측기 전체에서 실행되며 문제가 발생하면 로버가 멈추고 '이벤트 레코드'라는 데이터를 지구로 보냅니다. 기록에는 다양한 범주의 긴급 성이 포함되어 있으며, 2015 년 초, 로버는 본질적으로 "이것은 매우 나쁘다"라는 메시지를 보냈습니다. 로버 암의 드릴로 인해 단락과 같은 전류 변동이 발생했습니다.
"Curiosity의 소프트웨어는 화장실에있는 누전 차단기와 같은 단락을 감지 할 수있는 능력을 가지고 있습니다"라고 Morookian은 다음과 같이 설명합니다.
팀은 화성에 가서 문제를 해결할 수 없으므로 로버에 소프트웨어 업데이트를 보내거나 운영 절차를 변경하여 모든 것이 해결됩니다.

Vasavada는 다음과 같이 말합니다.“이제 드릴 사용법에 대해 더욱 신중을 기해야합니다. 처음에는 힘을 다해 드릴링하지 말고 천천히 상승하십시오. 우리가 지금 운전하는 방식과 비슷하지만 더 진지하지만 여전히 일을 끝냅니다. 아직 큰 영향을 미치지는 않았습니다. "
로버가 만나는 부드러운 이암 및 사암에는 드릴에 대한 가벼운 접촉이 필요했습니다. Morookian은 표준 시추 프로토콜의 공격에 따라 층암이지지되지 않을 우려가 있었기 때문에, 여전히 시추가 암석으로 충분한 진전을 이룰 수 있도록 가장 낮은 '설정'을 사용하도록 기술을 조정했다고 말했다.
그러나 호기심이 산을 가로 지르기 시작하면서 훈련을 사용할 기회가 증가하고 있습니다. 과학 팀이 이미지에서보고있는 모든 것의 지질 학적 맥락을 하나로 묶기 위해 노력하고있는 바바 다다 (Vasavada)가“목표 풍부하고 매우 흥미로운 영역”이라고 부르는 것을 통해 탐사선이 이동하고있다.
화성에서 균형 찾기
옐로 나이프 베이에서의 전환은 팀이 몇 가지 중요한 발견을 할 수있게 해주었지만, 후지산에 가야한다는 압박감을 느꼈습니다. 바사 바다는 예리한 상태로“1 년 동안 지옥처럼 운전했다”고 말했다.
이제 산에는 적어도 4 개의 다른 암석 단위 (또는 층)를 통해 산을 목표로하여 임무를 최대한 활용해야한다는 압박감이 남아 있습니다. 날카로운. 각 층은 화성 역사의 장과 같을 수 있습니다.

“산 탐험. Vasavada는“Sharp는 매우 흥미 롭습니다. 그리고 우리는 정말 위대한 발견들 사이에서 혼합을 유지하려고 노력하고 있습니다. 당신 앞에있는 바위를 면밀히 살펴보면 절대 저기 다른 흥미로운 바위를 볼 수 없을 것입니다.”
Vasavada와 Morookian은 매일 균형을 유지하는 것이 어려운 일이라고 말했습니다. 과학을위한 운전과 정지 사이의 완벽한 최적화의 '곡선의 무릎'또는 '달콤한 지점'을 찾는 것입니다.
그런 다음 모든 계측기로 전체 관측을 중단하고 덜 강렬한 관측이 이루어지는 '플라이 과학'을 수행하는 것 사이에는 균형이 있습니다.
Vasavada는“우리는 관찰 할 수 있고 실시간으로 가능한 모든 가설을 생성 할 수 있습니다. "100 개의 공개 질문이 남아 있어도 충분한 데이터를 얻었을 때 나중에 질문에 답변 할 수 있습니다."
호기심의 주요 목표는 정상 회담이 아니라 지질 학자들이 역사상 많은 물을 본 암석과 그렇지 않은 암석 사이의 경계를 찾을 것으로 예상되는 약 1,330 피트 (400 미터)의 지역입니다. 이 경계는 습성 행성에서 건조한 행성으로의 화성 전이에 대한 통찰력을 제공하여 행성의 역사를 이해하는 데 중요한 차이를 채 웁니다.

호기심이 얼마나 오래 지속 될지, 또는 전임자 정신과 기회를 좋아하는 사람들을 놀라게할지는 아무도 모릅니다. 화성 (지구 2 년)에서 1 년의 '프라임 미션'을지나 이제 확장 된 미션에서 가장 큰 변수는 RTG 전원입니다. 가용 전력은 꾸준히 감소하기 시작하지만 바사 바다와 모로 키안은 적어도 4 년 이상 지구에 문제가있을 것으로 예상하지 않으며, 올바른“육성”으로 전력이 12 년 이상 지속될 수 있습니다.
그러나 그들은 호기심이 얼마나 오래 걸릴지, 또는 예상치 못한 사건이 미션을 끝낼 수 있는지 예측할 방법이 없다는 것도 알고 있습니다.
짐승
호기심은 이전 화성 탐사선처럼 성격이 있습니까?
Vasavada는“실제로 우리는 사람들이 정신과 기회를 가지고했던 것처럼이 로버를 의인화하지 않는 것 같습니다. “우리는 감정적으로 유대감을 갖지 못했습니다. 사회 학자들은 실제로 이것을 연구하고 있습니다.” 그는 즐거운 미소로 고개를 저었다.
바사 바다는 호기심의 규모와 관련이있을 수 있다고 지적했다.
"나는 그것을 거대한 짐승이라고 생각한다"고 그는 직설적으로 말했다. "하지만 전혀 의미가 없습니다."

Vasavada는이 사명을 특징 짓게 된 것은 모든 차원에서 그 복잡성이라고 말했다. 모든 사람의 재능을 최적화하면서 500 명의 사람들이 함께 일하고 협력하도록하는 인간적 요소; 로버를 안전하고 건강하게 유지; 매일 10 개의 도구를 유지하는데, 때로는 전혀 관련없는 과학 과제를 수행합니다.
Vasavada는“매일 매일 수많은 일이 벌어 져야하는 우리의 작은 '7 분의 공포'입니다. “수백만 가지의 잠재적 인 문제와 상호 작용이 있으며, 엉망으로 만들 수있는 백만 가지 방법이 있기 때문에 일이 잘못 될 수있는 모든 방법에 대해 끊임없이 생각해야합니다. 복잡한 춤이지만 다행히도 훌륭한 팀이 있습니다.”
그런 다음 그는 미소로 덧붙였다.“이 임무는 짐승이더라도 흥미 롭습니다.”
"우주에서 놀라운 이야기 : 우주에 대한 우리의 견해를 바꾸는 임무에 대한 비하인드 스토리보기"는 Macmillan의 자회사 인 Page Street Publishing에 의해 출판되었습니다.