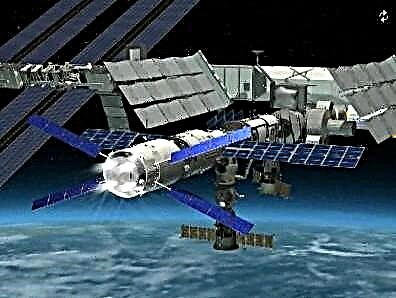
4 월 3 일 국제 우주 정거장 (ISS)에 도킹 한 이후 처음으로 자동 전송 차량 (A T V) "줄스 베른 (Jules Verne)"이 깨어나고 인상적인 작업을 수행하도록 지시했습니다. 현재 스테이션의 Zvezda 모듈에 부착 된 로봇 공급선은 12 분 20 초 동안 주요 엔진을 연소 시켰습니다. ESA 우주선이 이러한 작업을 수행 한 것은 이번이 처음이며, 280 톤의 역을 4.5km (2.8 마일)에서 342km (213 마일)의 새로운 고도로 들어 올린 것으로 보입니다. 진정한 ESA 스타일로 이벤트의 멋진 비디오 시뮬레이션을 출시했습니다.
ISS는 정기적으로 올바른 방향으로 조금만 밀어야합니다. 관측소가 지구를 공전함에 따라 지구의 확장 된 대기에서 약간의 마찰이 발생합니다. 이 대기 드래그는 궤도 전초 기지를 느리게하여 더 낮은 궤도로 떨어 뜨립니다. 필요한 경우 ISS를 더 높은 고도로 밀어야합니다. 지금까지“재 부스트”는 우주 왕복선, 러시아 발전 및 ISS 자체에 의해 수행되었습니다. 그러나 오늘, 그것은 우주에서 가장 진보 된 유럽 우주선의 전환이었습니다. Jules Verne은 여전히 많은 양의 연료를 탑재하고 있기 때문에이 기술에 이상적입니다.
금요일 오전 4시 22 분 (그리니치 표준시), 4 개의 강력한 ATV 로켓 중 2 개가 프랑스 툴루즈의 미션 컨트롤 신호를받은 후 생명을 얻었습니다. 공급선은 2.65m / s의 추력을 제공하여 궤도 경로를 따라 ISS를 가속화했습니다. 이 증가 된 속도는 궤도를 증가시켰다. 미션 컨트롤러는 740 초 동안 이벤트를 신중하게 모니터링했습니다.
ATV 리 부스트의 ESA 비디오 시뮬레이션보기»
이 재 부스트는 ATV에 3 주 동안 활동이 없으면 발생합니다. 무인 화물선은 ISS에 1150kg (2535lb)의 물, 음식 및 기타 공급품을 가져 오기 위해 3 월 9 일에 시작되었습니다. 이것은 우주 교통 통제에 매우 바쁜 시간임이 증명되었습니다. 먼저 ATV가 시작된 다음 3 월 11 일 우주 왕복선 노력이 시작되었고 4 월 8 일 Soyuz ISS 16S가 시작되었습니다. Jules Verne은 짧은 빨대를 뽑고 Endeavour가 도킹하여 임무를 수행 한 다음 집으로 돌아올 때까지 주차 궤도에서 기다려야했습니다. ATV는 이번에 4 월 3 일에 도킹 할 때까지 테스트를 실행했습니다.
이제 ISS는 5 월 말에 발사 예정인 우주 왕복선 발견 (STS-124)에 도착할 준비가되었습니다. 디스커버리는 성장하는 스테이션에 일본 기보 실험실을 설치할 예정입니다. 6 월 12 일, 7 월 8 일 및 8 월 6 일에 ATV에 대한 또 다른 3 개의 리 부스트가 계획되어 있습니다. 마지막 부스트 직후 Jules Verne은 Zvezda 모듈에서 분리되어 대기 중으로 떨어질 예정이며 6.5 톤의 쓰레기를 태평양의 통제 된 재진입 화상으로 운반합니다. 놀라운 기술의 슬픈 끝.
출처 : ESA