다음은 내 새 책인“우주에서 놀라운 이야기 : 우주 뒤편에서 우주를 바라 보는 우리의 시각을 바꾸는 임무를 본다”에서 발췌 한 것입니다. NASA 로봇 임무와이 발췌 부분은 우주 잡지, 2 장, "호기심으로 움직이는 화성"의 3 부 중 1 부입니다. 이 책은 Amazon과 Barnes & Noble에서 주문할 수 있습니다.
테러의 7 분
로버 나 로봇 착륙선과 같은 적당한 크기의 우주선이 화성 대기를 통과하여 행성 표면에 도달하는 데 약 7 분이 걸립니다. 이 짧은 시간 동안, 우주선은 약 13,000mph (20,900kph)의 타오르는 들어오는 속도에서 감속하여 2mph (3kph) 이하로 터치 다운해야합니다.
이를 위해서는 Rube Goldberg와 같은 일련의 이벤트가 정확한 안무와 타이밍으로 완벽한 순서로 진행되어야합니다. 그리고 지구상의 어느 누구도 입력하지 않고 컴퓨터를 통해 자동으로 발생해야합니다. 약 1 억 5 천만 마일 떨어진 지구에서 우주선을 원격으로 안내 할 수있는 방법이 없습니다. 이 거리에서 지구에서 화성까지의 무선 신호 지연 시간은 13 분 이상입니다. 그러므로, 7 분의 하강이 끝날 무렵, 모든 사건이 발생했거나 발생하지 않았으며, 지구상의 어느 누구도 어느 것을 알지 못했습니다. 우주선이 화성 표면에 웅장하게 앉아 있거나 부서진 더미에 놓여 있습니다.

그렇기 때문에 화성에 이르는 미션에서 과학자와 엔지니어는 이것을 "7 분의 공포"라고 부릅니다.
2011 년 11 월 지구에서 발사 된 MSL (Mars Science Laboratory) 미션을 통해 공식적으로 '엔트리, 하강 및 착륙'(EDL)에 대한 두려움과 떨림이 기하 급수적으로 증가했습니다. MSL은 Curiosity라는 1 톤 (900kg), 6 륜 로버를 특징으로하며,이 로버는 새로운 시도되지 않은 착륙 시스템을 사용하게되었습니다.
현재까지 모든 화성 착륙선과 로버는 로켓 유도 식 입구, 차량을 보호하고 늦추는 열 차폐 장치, 낙하산을 사용한 후 추력 장치를 사용하여 차량 속도를 늦추 었습니다. 호기심도이 순서를 사용합니다. 그러나 최종 결정적인 구성 요소는 가장 복잡한 착륙 장치 중 하나를 포함합니다.

"하늘 크레인"이라고 불리는 호버링 로켓 스테이지는 라 펠링 산악인처럼 Vectran 로프의 66 피트 (20 피트) 케이블로 로버를 낮추고 로버는 부드러운 랜딩을 바퀴에 직접 싣습니다. 이 모든 작업은 단 몇 초 만에 완료되어야했으며 온보드 컴퓨터가 터치 다운을 감지하면 불꽃 기술이 줄을 끊고 호버링 강하 단계가 전체 스로틀에서 축소되어 호기심에서 멀리 떨어졌습니다.
문제를 더욱 복잡하게 만드는이 로버는 가장 정확한 오프 월 착륙을 시도하여 레이니어 산의 높이에있는 산 옆 분화구 내부로 내려 갔다.
불확실성의 주요 부분은 엔지니어가 전체 착륙 시스템을 순서대로 함께 테스트 할 수 없다는 점이었습니다. 화성 자체를 제외하고는 화성에 존재하는 잔인한 대기 조건과 가벼운 중력을 시뮬레이션 할 수있는 것은 없습니다. 실제 착륙은 풀업 스카이 크레인을 처음 사용하는 것이기 때문에 케이블이 분리되지 않으면 어떻게됩니까? 하강 단계가 로버 바로 위에서 계속 내려 가면 어떨까요?
스카이 크레인이 작동하지 않으면 기술 문제, 지연, 비용 초과 및 25 억 달러의 화성 로버가 돈을 피한다고 말한 비평가의 분노가 이미 극복 한 미션의 게임 오버 일 것입니다 NASA의 나머지 행성 탐사 프로그램.

화성에 임무
밤하늘에 붉은 빛을 내면서 화성은 수백 년 동안 스카이 워커를 손짓했습니다. 미래의 인간 임무 또는 식민지화를위한 잠재력을 제공하는 지구와 가장 가까운 행성으로서 우주 탐사 시대에 큰 관심을 끌었습니다. 현재까지, 붉은 행성에 40 개 이상의 로봇 미션이 시작되었습니다.보다 정확하게는 40 개 이상의 미션이있었습니다. 시도했다.
미국, 유럽, 소비에트 / 러시아 및 일본의 모든 노력을 포함하여 발사 재난, 화성으로 향하는 오작동, 궤도 진입 시도 또는 치명적인 착륙으로 인해 화성 임무의 절반 이상이 실패했습니다. 최근의 임무는 제자리에서 우주를 탐험하려는 최초의 개척 시도보다 더 큰 성공을 거두었지만 과학자와 엔지니어는 'Great Galactic Ghoul'또는 'Mars Curse'와 같은 것들에 대해 이야기 할 때 부분적으로 농담을하고 있습니다. 임무.

그러나 놀라운 성공도있었습니다. 1960 년대와 70 년대에 마리너 궤도 선과 바이킹 착륙선과 같은 초기 임무는 우리가 혹독하고 바위가 많은 세상이지만 놀랍도록 아름답다는 것을 보여주었습니다. 그러나 이후의 임무는 이분법을 밝혔습니다. 과거와 같은 오늘날의 물과 세계 활동에 대한 감미로운 힌트와 결합 된 웅장한 황폐.
오늘날 화성의 표면은 차갑고 건조하며, 속삭이는 대기는 태양으로부터의 방사선 충격으로부터 지구를 보호하지 않습니다. 그러나 지표는 화성의 조건이 항상 그런 것은 아닙니다. 흐르는 물에 의해 조각 된 것처럼 보이는 수로와 복잡한 계곡 시스템이 궤도에서 보입니다.
수십 년 동안 행성 과학자들은 소행성 파업이나 급격한 기후 재난과 같은 격변 적 사건으로 인한 짧은 습한시기에 이러한 특징이 형성되는지 또는 화성이 지속적으로 따뜻하고 습한 수백만 년에 걸쳐 형성되었는지에 대해 토론 해 왔습니다. 지금까지 많은 증거가 모호하다. 이러한 기능은 어느 쪽이든 형성 될 수 있습니다. 그러나 수십억 년 전에 지구와 마찬가지로 강과 바다가 있었다면 생명이 멈췄을 것입니다.

로버
호기심 로버는 NASA가 화성 표면으로 보낸 네 번째 모바일 우주선입니다. 첫 번째는 1997 년 7 월 4 일 바위로 덮인 화성 평원에 착륙 한 Sojourner라는 이름의 23 파운드 (10.6kg) 로버였습니다. 전자 레인지의 크기에 대해 2 피트 (65cm) 길이의 Sojourner는 절대로 순회하지 않았습니다. 착륙선과 기지국에서 40 피트 이상 떨어져 있습니다. 로버와 랜더는 함께 패스 파인더 임무를 구성했으며 약 1 주일 정도 지속될 것으로 예상되었습니다. 그 대신 거의 3 개월이 걸렸으며 듀오는 2.6 기가비트의 데이터를 반환하여 착륙선에서 16,500 개가 넘는 이미지와 로버에서 550 개가 넘는 이미지를 찍을 수 있었으며, 암석과 토양의 화학적 측정을 수행하고 화성의 대기와 날씨를 연구했습니다. 화성에 대한 더 따뜻하고 습한 과거의 흔적을 발견했습니다.

미션은 인터넷이 막 인기를 얻었을 때 이루어졌으며 NASA는 로버가 지구로 전송되는 즉시 온라인에서 사진을 게시하기로 결정했습니다. 이는 NASA의 웹 사이트 (및 미러 사이트가 수요가 많은 곳으로 설정 됨)가 착륙 후 처음 20 일 동안 4 억 4 천만 건의 조회를받는 등 젊은 인터넷 역사상 가장 큰 사건 중 하나였습니다.
패스 파인더도 특이한 착륙 시스템을 사용했습니다. 스러 스터를 사용하여 표면을 터치하는 대신 엔지니어들은 우주선을 둘러싸고 보호하기 위해 거대한 에어백 시스템을 구성했습니다. 로켓 유도 식 입구, 열 차폐, 낙하산 및 추진기의 기존 시스템을 사용한 후 에어백이 팽창하고 누에 고치 착륙선이 지상 100m (30m)에서 떨어졌습니다. 거대한 해변 공처럼 화성 표면을 가로 질러 여러 번 튀어 나온 패스 파인더는 결국 멈추고 에어백이 수축하고 착륙선이 열리면서 로버가 등장했습니다.
그것이 미친 착륙 전략처럼 들릴지 모르지만, NASA는 다음 로버 임무를 위해 더 큰 버전의 에어백을 사용하기로 결정했습니다. Spirit과 Opportunity라는 두 개의 동일한 로버. MER (Mars Exploration Rovers)는 약 1.6kg (5.2 피트) 길이의 잔디 깎는 기계의 크기이며 무게는 약 1kg (185kg)입니다. 스피릿은 2004 년 1 월 4 일 화성 적도 근처에 성공적으로 착륙했으며 3 주 후 지구 반대편에서 기회가 튀어 나왔습니다. MER의 목표는 화성에서 과거의 물에 대한 증거를 찾는 것이었고, 두 로버가 대박을 쳤다. 많은 연구 결과에서 기회는 흐르는 물에 형성된 고대 암석 노두를 발견했으며, 스피릿은 과학자들이 아직 연구하고있는 특이한 콜리 플라워 모양의 실리카 암석을 발견했지만 잠재적 인 고대 화성의 삶에 대한 단서를 제공 할 수 있습니다.

놀랍게도이 글 (2016 년)에서 기회 로버는 여전히 마라톤 (26 마일 / 26km) 이상을 운전하고 있으며 엔데 아 부르 (Endeavour)라는 큰 분화구에서 화성을 계속 탐험하고 있습니다. 그러나 스피릿은 모래 덫에 갇힌 후 2010 년에 화성의 추운 겨울 동안 전력이 끊겼습니다. 두 로버의 예상 수명은 90 일보다 훨씬 길었습니다.
어쨌든, 로버는 각각 고유 한 '인격'을 개발했습니다. 할당 로봇에 대한 개성. 영은 문제가있는 아이이자 드라마 여왕이지만 모든 발견에 어려움을 겪어야했다. 새로운 발견이 그녀에게 쉬운 것처럼 보였을 때, 특권 여동생이자 스타 출연자 인 기회. 정신과 기회는 사랑스럽지 않게 디자인되었지만 매력적인 로버는 아이들의 상상력과 노련한 우주 참전 용사 모두를 사로 잡았습니다. MER 프로젝트 매니저 인 존 칼라스 (John Callas)는 한때 트윈 로버를“태양계에서 가장 귀여운 물건”이라고 불렀습니다. 오래 지속되는 펑크 로버는 위험과 위험을 극복하면서 매일 화성에서 엽서를 보냈습니다. 그리고 Earthlings는 그것을 좋아했습니다.
호기심
우리가 할 일 목록에 오래 전부터 있지만, 우리는 아직 인간을 화성으로 보내는 법을 찾지 못했습니다. 우리는 더 크고 진보 된 로켓과 우주선, 생명 유지와 우리 자신의 음식 재배와 같은 것들을위한 더 나은 기술이 필요하며, 화성에 인간 정착지를 만드는 데 필요한 매우 큰 탑재량을 착륙시킬 능력이 없습니다.
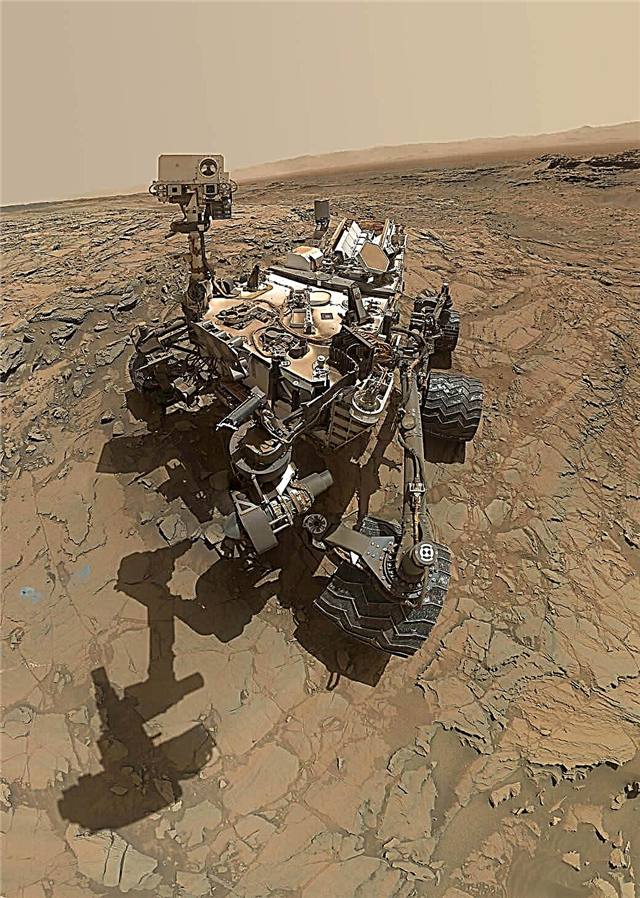
그러나 그 동안 – 우리가 모든 것을 알아 내려고 노력하는 동안, 우리는 인간 지질 학자와 동등한 로봇을 붉은 행성으로 보냈습니다. 자동차 크기의 Curiosity 로버에는 17 대의 카메라, 드릴, 스쿠프, 핸드 렌즈 및 레이저가 장착되어 있습니다. 이 도구는 지질 학자들이 지구상의 암석과 광물을 연구하는 데 사용하는 장비와 유사합니다. 또한이 로버는 등산, 식사 (비 유적 표현), 팔을 구부리거나 셀카를 찍음으로써 인간의 활동을 모방합니다.

이 로빙 로봇 지질학자는 이동 화학 실험실이기도합니다. 로버에있는 총 10 개의기구는 생명에 필요한 원료를 나타내는 유기 탄소를 검색하고 화성의 공기를“스니핑”하여 메탄과 같은 가스 (생명의 징후 일 수 있음)가있을 경우 냄새를 맡게합니다. 호기심의 로봇 팔에는 스위스 렌즈 가제트 렌즈가 있습니다. 확대 렌즈와 같은 카메라, 화학 원소를 측정하는 분광계, 암석 내부를 뚫고 SAM (Mars의 시료 분석) 및) 실험실에 샘플을 공급하는 드릴 (화학 및 광물학). ChemCam 레이저는 최대 7 미터 (23 피트) 떨어진 곳에서 암석을 기화시킬 수 있으며, 발파 된 암석에서 방출 된 빛의 스펙트럼에서 미네랄을 식별 할 수 있습니다. 기상 관측소와 방사선 모니터는 기내 장치를 정리합니다.
이 카메라와 기기를 사용하면 약 500 명의 지구 과학자들로 구성된 국제 팀의 눈과 손이됩니다.
이전의 화성 탐사선은 태양열을 사용하여 전력을 위해 햇빛을 수집했지만 Curiosity는 New Horizons와 같은 RTG를 사용합니다. RTG에서 생성 된 전기는 재충전 가능한 리튬 이온 배터리에 반복적으로 전원을 공급하며 RTG의 열도 로버 섀시로 파이프되어 내부 전자 장치를 따뜻하게 유지합니다.
호기심의 크기와 무게로 인해 이전 로버가 사용한 에어백 착륙 시스템은 문제가되지 않았습니다. NASA 엔지니어 Rob Manning은 다음과 같이 설명합니다.“큰 것을 튕겨서는 안됩니다.” 스카이 크레인은 대담한 솔루션입니다.
호기심의 사명 : 화성이 수십억 년에 걸쳐 어떻게 진화했는지 파악하고 그것이 한때 (또는 지금은) 미생물 생활을 지원할 수 있었는지 판단하십시오.
호기심의 탐사 목표 : 5.5km 높이의 화성 산 과학자들은 Mt. 직경이 155km 인 게일 분화구 한가운데있는 샤프 (공식적으로 Aeolis Mons).
게일은 60 개의 후보 사이트에서 선정되었습니다. 궤도를 도는 우주선의 데이터에 따르면이 산에는 수백만 년에 걸쳐 지어진 수십 층의 퇴적암이 있다고합니다. 이 층들은 화성의 지질 및 기후 역사에 대한 이야기를 들려 줄 수 있습니다. 또한, 산과 분화구에는 흐르는 물에 의해 조각 된 것처럼 보이는 수로 및 기타 특징이있는 것으로 보입니다.
계획 : MSL은 분화구의 더 낮고 평평한 부분에 착륙하여 각 층을 연구하면서 본질적으로 화성 지질 역사의 시대를 여행하면서 산쪽으로 조심스럽게 올라갑니다.
가장 어려운 부분은 거기에 도착했을 것입니다. 그리고 MSL 팀은 단 한 번의 기회 만 얻었습니다.
방문 밤
2012 년 8 월 5 일 호기심의 착륙은 최근 역사상 가장 예상되는 우주 탐사 행사 중 하나였습니다. 수백만의 사람들이 온라인과 TV에서 이벤트를보고 소셜 미디어 피드가 업데이트로 흥을 ing습니다. JPL의 미션 컨트롤에서 NASA TV의 피드는 뉴욕 타임 스퀘어의 화면과 '방문객'을 주최하는 전 세계의 장소에서 생중계되었습니다.
그러나 행동의 진원지는 JPL에서 수백 명의 엔지니어, 과학자 및 NASA 직원이 JPL의 우주 비행 운영 시설에 모였습니다. EDL 팀 (모두 일치하는 하늘색 폴로 셔츠 착용)은 미션 컨트롤에서 컴퓨터 콘솔을 모니터링했습니다.
두 명의 팀원이 눈에 띄었습니다. EDL 팀의 리더 인 Adam Steltzner (Elvis와 같은 퐁파두르에서 머리카락을 쓰고 있음)는 콘솔 줄 사이에서 앞뒤로 움직입니다. 비행 감독 Bobak Ferdowski는 정교한 별과 줄무늬 모 호크를 선보였습니다. 분명히, 21 세기에 이국적인 헤어 스타일이 NASA 엔지니어를위한 1960 년대의 검은 안경과 포켓 프로텍터를 대체했습니다.

상륙 당시 Ashwin Vasavada는 미션 팀에서 가장 오랫동안 봉사 한 과학자 중 한 명으로 2004 년 로버가 건설 될 때 부 프로젝트 과학자로 MSL에 합류했습니다. 당시 Vasavada의 업무 중 상당 부분은 계측기 팀과 협력하여 계측기의 목표를 완성하고 계측기 개발 및 로버와의 통합을 돕기 위해 기술팀을 감독했습니다.
선택된 10 개의 도구 각각에 과학자 팀이 생겨서 엔지니어, 추가 직원 및 학생과 함께 수백 명의 사람들이 로버를 발사 할 준비를하고있었습니다. Vasavada는 화성에서 행해지는 최종 과학에 영향을 줄 수있는 모든 결정과 수정을 조정하는 데 도움을주었습니다. 그러나 착륙하는 동안 그는 할 수있는 모든 것을 보았습니다.
Vasavada는“저는 TV에서 보여지고있는 제어실 옆에있는 방에있었습니다. "상륙을 위해 지난 8 년간의 내 인생을 깨닫고 나서 내 미래가 모두 7 분 동안의 EDL을 타고 있다는 것 외에는 할 수있는 것이 없었습니다."
또한 무선 지연 시간으로 인해 13 분이 지나야 로버의 실제 운명을 알 수 없다는 사실은 JPL의 모든 사람들에게 무력감을 느꼈습니다.
Vasavada는“의자에 앉아 있지만 태아의 위치에 정신적으로 웅크 리고 있다고 생각한다”고 덧붙였다.
호기심이 화성에 가까워지면서 이미 행성을 공전하는 3 명의 다른 베테랑 우주선이 신생 MSL에 대한 정보를 전달할 때 이목을 집중시킬 수있는 위치로 이동했습니다. 처음에 MSL은 지구상의 DSN (Deep Space Network) 안테나와 직접 통신했습니다.
EDL 동안 우주선의 원격 측정을 최대한 간소화하기 위해 Curiosity는 착륙 과정의 단계가 활성화 된시기를 나타내는 128 개의 단순하지만 뚜렷한 톤을 보냈습니다. 관제실의 엔지니어 인 Allen Chen은 그들이 올 때마다 다음과 같이 발표했습니다. 또 다른 하나는 추력 자들이 발사되어 우주선을 게일 분화구로 안내한다는 신호를 보냈다. 초기 톤의 미션 컨트롤 팀이 임시 박수와 미소를 지었고 우주선이 표면에 점점 가까워지면서 감정이 증가했습니다.
하강을 거치면서 MSL은 화성의 지평 아래로 내려가 지구와의 통신에서 제외되었습니다. 그러나 Mars Odyssey, Mars Reconnaissance Orbiter 및 Mars Express의 3 개의 궤도 선은 DSN에 데이터를 캡처, 기록 및 중계 할 준비가되었습니다.

매끄럽게 착륙의 각 단계가 계속됨에 따라 음색은 계속 지구에 왔습니다. 낙하산이 배치되었습니다. 열 차폐 장치가 떨어졌습니다. 신호음은 로버를 운반하는 하강 단계가 낙하산을 놓았 음을 나타내며, 다른 하나는 동력 비행 및 지표면으로의 하강을 나타냅니다. 또 다른 신호음은 Sky Crane이 로버를 표면으로 낮추기 시작했음을 의미합니다.
호기심의 바퀴가 표면에 닿았 음을 나타내는 신호음이 들렸지 만 그게 성공을 의미하지는 않았습니다. 팀은 스카이 크레인 비행 조종 조작이 작동하도록해야했습니다.
첸은 환호했다. "우리는 화성에 안전합니다!"
JPL의 미션 컨트롤, 랜딩 파티 사이트 및 소셜 미디어에서 판 데모 니움과 기쁨이 폭발했습니다. 그 순간 세상이 함께 축하 된 것 같습니다. 비용 초과, 지연, MSL 임무에 대한 모든 부정적인 것들이 착륙의 승리로 사라지는 것처럼 보였습니다.
“화성에 오신 것을 환영합니다!” 제트 추진 연구소의 찰스 엘라 치 (Charles Elachi) 감독은 극적인 터치 다운 이후 기자 회견에서“오늘 우리는 착륙했습니다. 내일 우리는 화성을 탐험하기 시작합니다. 우리의 호기심에는 한계가 없습니다.”

Vasavada는“실제로 7 분이 빨리 걸렸습니다. “알기 전에는 끝났습니다. 그리고 우리 대부분은 여전히 성공적으로 처리하고 있었지만 모두가 위아래로 점프하고있었습니다.”
착륙이 정말 완벽하게 진행되었다는 사실은 실제로 JPL의 일부 팀에 충격을 주었을 것입니다. 그들은 호기심의 착륙을 여러 차례 연습했지만 놀랍게도 시뮬레이션에서 차량을 착륙시킬 수 없었습니다.
Vasavada는“우리는 그것을 매우 정확하게 연습하려고 노력했습니다. 그래서 모든 것이 동기화되었습니다. 우리가 시뮬레이트 한 원격 측정법과 우주선에서 나온 실시간 측정법, 그리고 실시간 애니메이션이 만들어졌습니다. 꽤 복잡한 일 이었지만 실제로는 효과가 없었습니다. 따라서 실제 실제 착륙은 모든 것이 올바르게 작동 한 첫 번째였습니다.”
호기심은 주변의 사진을 즉시 찍도록 프로그래밍되었습니다. 착륙 후 2 분 이내에 첫 번째 이미지가 지구로 전송되어 JPL의 시청 화면에 나타납니다.
Vasavada는“우리는 착륙하는 동안 궤도를 도는 시간을 정했지만, 릴레이 링크가 초기 사진을 내려 놓을 정도로 오래 지속 될지 확실하지 않았다”고 말했다. “보호 커버가 여전히 카메라 위에 있고 스러 스터가 커버에 많은 먼지를 쏟아 부었기 때문에 첫 번째 사진은 상당히 거칠 었습니다. 우리는 그것을 잘 볼 수 없었지만 그럼에도 불구하고 여전히 화성 사진이기 때문에 위아래로 뛰었습니다.”
놀랍게도, 첫 번째 그림 중 하나는 로버가 연구를 위해 보낸 것을 정확하게 보여주었습니다.
“우리는 카메라가 기본적으로 Mt. 바사 바다는 고개를 저으며 말했다. “바퀴 사이에있는 HazCam (위험 카메라) 이미지에서이 멋진 사진을 얻었습니다. 산이 있었다. 그것은 우리 앞에있는 전체 임무의 미리보기와 같았습니다.”

내일 :‘화성 시간에 대한 생활’과‘발견’과 함께“호기심을 가진 움직이는 화성”의 2 부
"우주에서 놀라운 이야기 : 우주에 대한 우리의 견해를 바꾸는 임무에 대한 비하인드 스토리보기"는 Macmillan의 자회사 인 Page Street Publishing에 의해 출판되었습니다.