오는 7 월 화성 2020 로버는 플로리다 주 케이프 커 내버 럴 (Cape Canaveral)에서 출발하여 레드 플래닛 (Red Planet)으로 여행을 시작합니다. Jezero 분화구에서 손을 ro 후, 로버는 다음과 유사한 과학 작업을 시작합니다. 호기심 이 작업은 거친 지형을 주행하고 대기를 샘플링하고 드릴 샘플을 수집하여 화학적 분석을 수행하는 것으로 구성됩니다.
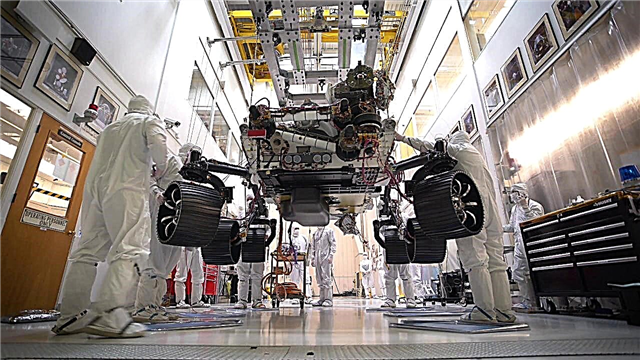
NASA의 제트 추진 연구소 (Jet Propulsion Laboratory)의 엔지니어링 팀은이 임무를 수행 할 준비를하기 위해 로버의 속도를 높이고 있습니다. 10 월 8 일에는 로버의 무게를 다리와 바퀴에 처음으로 올려 놓는 것이 포함되었습니다. 유아에게 처음으로 선전 된이 이벤트는 아래에서 볼 수있는 타임 랩스 비디오로 캡처되었습니다.
로버의 무게가 정확히 1 톤 또는 1,050kg (2,315lb) 이상이기 때문에 자체 무게를 지탱하는 것은 쉬운 일이 아닙니다. 자매 로버처럼 호기심, 이 무게를 지탱하는 일은 티타늄 다리로 본체에 연결된 6 개의 알루미늄 휠로 이루어집니다. 각 휠에는 견인력을 제공하는 클릿 (또는 거슬러)이있어 로버가 화성의 거친 지형을 운전하고 조종 할 수 있습니다.
JPL의 2020 년 화성에서 일하는 기계 시스템 엔지니어 인 벤 릭스 (Ben Riggs)는 최근 NASA의 언론 보도에서 다음과 같이 말했다.
“수년간의 디자인, 분석 및 테스트를 거친 후 처음으로 바퀴에서 로버를 보는 것이 환상적입니다. 전체 팀은 먼 미래에 화성에서 동일한 구성으로 그녀를 만나기를 기대합니다.”
로버의 디자인은 "로커 대차"시스템으로 알려진 여러 개의 피벗 포인트와 스트럿으로 구성된 새로운 서스펜션 시스템을 통합합니다. 이것은 로버가 각 휠에 상대적으로 일정하고 동일한 무게 분포를 유지함으로써 안정성을 유지할 수있게합니다. 이것은 또한 로버가 바퀴와 같은 크기의 장애물과 함몰 부를 롤오버 할 수있게합니다.
휠에는 개별 조향 모터가 장착되어있어 로버를 360도 회전시켜 거친 지형에서도 기동성을 높일 수 있습니다. 로버는 모든 방향으로 45도 기울어지면서 운전할 수 있지만 (도움없이) 운전자는 30도 이상 기울어 진 지형을 피할 수 있습니다.

타임 랩스 비디오에 들어간 사진은 모두 JPL 시뮬레이터 빌딩 내부에서 찍은 것입니다. 화성 2020 로버는 지난 몇 주 동안 테스트를 거쳤습니다. 여기에는 극한의 온도와 진공 상태가 특징 인 화성 환경에서 계측기, 시스템 및 하위 시스템이 작동하는 방식에 대한 광범위한 평가가 포함되었습니다.
때가되면 로버는 NASA의 우주 발사 단지 41에서 케이프 커 내버 럴 공군 역의 유나이티드 발사 연합 꼭대기에서 발사됩니다. 아틀라스 V 로켓. 이 임무는 2021 년 2 월 18 일까지 화성에 도착할 예정이며, 그곳에서 화성의 물 과거에 대한 추가 증거를 얻기 위해 제로 분화구를 탐험하고 결국 지구로 돌아갈 샘플을 수집 할 것입니다.
또한 로버는 화성에서의 과거 (그리고 아마도 현재의) 삶에 대한 결정적인 증거를 찾을 수 있기를 바랍니다. 그 이후로 격렬한 논쟁을 해결하는 것 외에도 바이킹 1 과 2 1970 년대 중반에 선교 사업이 착륙선을 보냈습니다. 마침내 지구 너머에 생명이 존재한다는 의심의 여지가 없습니다!
그 사이에 여전히 Mars 2020의 이름을 지정할 수있는 기회가 있습니다. NASA 웹 사이트로 이동하여 경기장을 만드십시오!