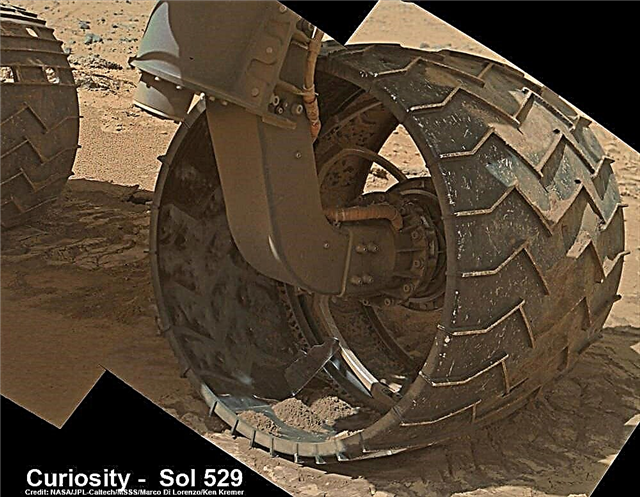
가까이서 찍은 사진 모자이크는 최근 몇 개월 동안 샤프 산으로 여행을 가면서 날카로운 모서리가있는 화성암을 운전 한 결과 호기심의 왼쪽 앞바퀴가 오래 찢어지는 모습을 보여줍니다. 2014 년 31 월 (Sol 529)은 6 개의 바퀴 중 몇 개에 대한 최근의 손상을 보여주기 위해 조립되었습니다.
크레딧 : NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
아래의 완전한 6 륜 모자이크 및 'Dingo Gap'모래 언덕 대체 경로 모자이크 및 3D보기 [/ 캡션]를 참조하십시오.
날카로운 모서리가있는 화성암 바위에서 바퀴가 계속 손상되면 엔지니어는 잠재적 인 위험한 사 구장을 통해보다 매끄러운 경로를 찾아 가야합니다.
로버 엔지니어가 2013 년 가을과 겨울 2013 년 6 월에 알루미늄 휠 6 개를 로봇에 구멍이 뚫린 것을 발견 한 이래로 팀은 휠을 훨씬 더 자주 그리고 신중하게 상태를 평가하고 있습니다. 위와 아래의 모자이크를 참조하십시오.
호기심의 처리자들은 이제 SUV 크기 로봇을 사 구장을 가로 지르는 대체 경로로 전환하는 것을 고려하고 있으며 그 너머의 계곡은 훨씬 더 매끄러운 화성 지형을 통과하여 "KMS-9"라고 불리는 매우 바람직한 과학 지구에 도달해야합니다.
1 월 31 일 금요일에만 로봇이 촬영 한 이미지를 수신하면 최소 2 ~ 3 인치 (5 ~ 8cm) 길이와 1 인치 정도 (3cm) 너비의 매우 삐걱 거리는 펑크가 나타납니다. 왼쪽 앞바퀴 안쪽.

불행히도, 거친 붉은 행성 암석의 들판은 1 톤의 거대에게 축복이 아닙니다.
1 월 31 일 (Sol 529)에 찍힌 호기심의 성스러운 바퀴 (위와 아래)에 대한 새로운 밑바닥 모자이크보기를 보면 내부를 겨냥하고 직경 20 인치 바퀴의 부상 정도를 생생하게 보여줍니다.

지난 6 개월 동안 거친 암석으로 가득 찬 화성 지형을 가로 지르는 주행 속도가 가속화되고 2012 년 8 월 착륙 이후 현재까지 주행 거리계에서 4.89 킬로미터 (3.04 마일) 이상 떨어진 곳에 바퀴 속도가 급격히 증가했습니다.
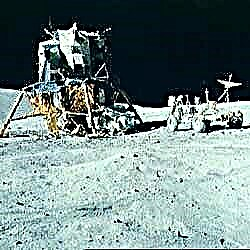
2014 년 1 월에 26865 미터 (865 피트)를 더 운전 한 후“Dingo Gap”이라고 알려진 그림 같은 입구 옆에있는 메가 로봇이 모래 언덕의 가장자리에 서 있습니다.
새로운 Sol 529보기를 2013 년 12 월 Sol 490의 Underbelly Mosaic와 비교하여 지난 몇 개월 동안의 피해 증가를 확인할 수 있습니다.

그러나“Dingo Gap”을 가로 지르는 사구 절단 높이는 약 3 피트 (1 미터)입니다.
NASA의이 3D "Dingo Gap"모자이크보기를보고 팀이 직면 한 선택을 스스로 판단 할 수 있습니다.

따라서 팀은 몇 년 전 성령의 죽음을 초래 한 것과 같은 숨겨진 모래 함정에 갇히고 싶지 않기 때문에 다리를 연결하는 것이 안전한지 평가하고 있습니다.
NASA의 성명서 호기심 프로젝트 관리자 인 NASA의 제트 추진 연구소의 짐 에릭슨 (Jim Erickson)은“이 결정은 아직 이루어지지 않았지만 확인을하는 것이 현명하다”고 말했다.

"고해상 이미징 과학 실험 (High Resolution Imaging Science Experiment)에 의해 포착 된 궤도 이미지를 기반으로하여, 우리는 궤도 이미지가 분석하는 것만 큼 지형이 잘 보이는지 확인하기 위해 모래 언덕을 서쪽으로 즉시 서쪽으로 들여다 볼 것입니다." NASA의 Mars Reconnaissance Orbiter (MRO)의 오버 헤드를 돌고있는 HiRISE) 카메라.
이 팀은 또한 뒤에서 운전하거나 6 개의 바퀴 중 4 개만을 사용하여 들쭉날쭉 한 바위에 밀리는 바퀴의 힘을 줄이는 등 바퀴 펑크의 축적을 최소화하기 위해 다양한 구동 기술을 테스트하고 있습니다.
“Dingo Gap”은 남서쪽으로 향한 로버가 날카로운 산의 산기슭으로 향하는 여정을 따라“KMS-9”로가는보다 안전한 관문을 제공 할 수 있습니다.

Dingo Gap은 두 개의 낮은 상처 사이에 있으며 북쪽과 남쪽의 양쪽에서 가늘어집니다.
KMS-9는 2013 년 7 월 옐로 나이프 베이 사분면을 떠난 이후로 첫 번째 시추 작업을 수행하고자하는 잠재적으로 과학이 풍부한 목표입니다.
화성 까마귀가 날아가고 과학 팀에 호소하는 지질학을 특징으로하는 후보 시추 장소는 약 800m 떨어져 있습니다. 그러나 고려중인 로빙 루트는 실제 거리에서 훨씬 먼 거리입니다.
Pasadena 캘리포니아 공과 대학 (California Institute of Technology)의 과학 연구팀 공동 연구원 인 Katie Stack은“KMS-9에서는 세 가지 지형 유형이 노출되고 먼지가없는 표면이 보인다”고 말했다.
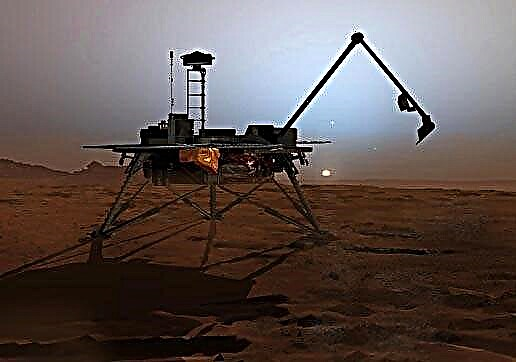
호기심은 이미 화성 미생물이 존재할 경우 화성 미생물을 지원할 수있는 거주 가능 지역을 발견하려는 주요 목표를 달성했습니다.
NASA의 로버 호기심은 고대 화성 호수가 오랜 기간 동안 미생물 생명체를 유지할 수 있었던 점토 광물을 포함하여 올바른 화학 성분을 가졌으며 이러한 거주 가능한 조건이 이전에 생각했던 것보다 최근의 신기원까지 지속되었다는 증거를 발견했습니다. .
그 결과, 과학 팀은 샤프 산의 퇴적암층에 보존 될 수있는 유기 분자에 대한 탐색 (우리가 알고있는 생명의 빌딩 블록)을 포함하도록 임무의 초점을 전환했습니다.
“실제로 우리가하고있는 일은 거주 할 수있는 환경을 추구하는 임무에서 유기 탄소를 보존하는 거주 할 수있는 환경을 찾기위한 임무로 전환하는 것”이라고 Curiosity Principal Investigator John 패서 디나 (Pasadena)에있는 캘리포니아 공과 대학 (California Institute of Technology)의 그로 징거 (Grotzinger)는 최근 미국 지구 물리 연합 (AGU)의 2013 년 12 월 연례 회의에서 말했다.
한편, NASA의 기회 로버는 화성 반대편에있는 솔 랜더 포인트 정상 회담에서 붉은 행성 신비를 조사하는 2 년 10 월 초에 점토 광물 노두를 탐험하고 있습니다.
정신과 기회의 10 대 10 대 발견에 관한 나의 새로운 이야기를 읽으십시오 – 여기.
그리고 지구의 침략 함대 인 NASA의 MAVEN과 인도의 MOM을 강화하기 위해 한 쌍의 새로운 궤도 선이 붉은 행성으로 뛰고 있습니다.
마지막으로, 중국의 새로운 유투 문 로버는 다음 주 2 월 8 일 또는 9 일쯤에 운명의 말을 기다리면서 두 번째 음력을 통해 동면하고 있습니다.
Ken의 지속적인 호기심, 기회, Chang'e-3, SpaceX, 궤도 과학, LADEE, MAVEN, MOM 및 화성 뉴스를 계속 시청하십시오.