작은 독일 소행성 착륙선이 10 월 2 일 화요일 (EDT) 늦게 목표물에 닿을 것으로 예상됩니다. 이 공예는 신비한 류 구의 표면에 대한 데이터를 다시 보내려고 노력하고 있는데, 일본의 하야부사 2가 3 월이 지난 후에도 정확한 구성이 계속되어 조사자들을 피하기 위해 마스코트를 우주로 보낸다.
MASCOT (Mobile Asteroid Surface Scout)이라는 착륙선은 오후 9시 58 분에 항공 모함 Hayabusa2와 분리 될 것으로 예상됩니다. 화요일 독일 항공 우주 센터 (DLR) 관계자는 성명에서 EDT (0158 GMT)를 발표했다. 하야부사 2가 소행성 류구에 떨어 뜨린 3 번째 착륙선이 될 것이다. MASCOT은 DLR과 프랑스 우주국 인 CNES의 프로젝트입니다.
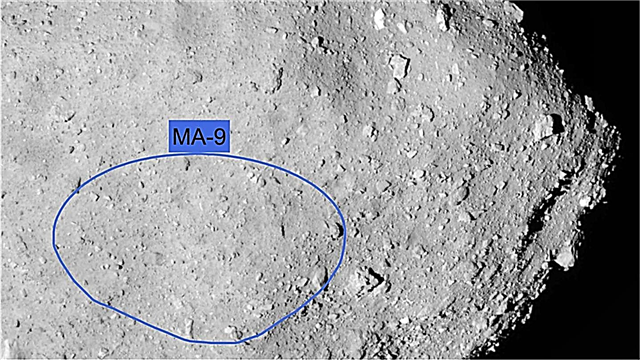
MASCOT의 정확한 착륙 지점은 예측할 수 없다. 왜냐하면 우주선이 소행성의 남반구 초기 터치 다운 위치에서 200 미터 (660 피트)까지 튀길 것이기 때문이다. [와! 베스트 에버 사진에서 소행성 류 구의 끔찍한 표면 팝]
DLR은 MASCOT의 다가오는 여정을 "미지의 세계로의 하강"이라고했습니다. 이 설명은 혜성 67P / Churyumov-Gerasimenko 근처의 혜성 궤도 Rosetta 우주선에서 Philae 착륙선을 방출 한 후 2014 년 유럽 우주국과 DLR 컨트롤러가 느꼈던 느낌 중 일부를 반영했습니다.

Philae의 착륙은 계획대로 진행되지 않았습니다. 크래프트의 안전 작살은 발사되지 않았으며 착륙선은 두 번 튀어 2 시간 동안 비행 한 후 그늘진 곳에서 쉬었습니다. 태양으로부터 멀리 떨어진 태양열 착륙선은 며칠 안에 사망했습니다. Rosetta가 Philae가 떨어진 곳을 정확히 추적하는 데 2 년이 걸렸습니다. 놀랍게도 Philae는 제한된 시간 동안 배터리 전력으로 과학적 데이터를 표면으로 돌려 보냈습니다.
일본은 또한 이전 소행성 임무 인 하야부사 이후 더 나은 운을 찾으려고 노력하고 있습니다. 이 임무는 2004 년 11 월에 거의 정확히 14 년 전에 MINERVA (소행성 용 마이크로 / 나노 실험용 로봇 차량)라는 착륙선을 배치하기로되어있었습니다. . Hayabusa2의 최근 MINERVA-II1 착륙은 일본 항공 우주 탐사 국에 대한 일종의 입증이었습니다.
자유 낙하

MASCOT은 짧은 임무를 수행하지만 계획에 따라 진행됩니다. 표면에서 약 16 시간 지속되도록 설계되었습니다. 그러나 그것은 착륙선이 안전하게 만들고 지구로 데이터를 다시 보낼 수 있다고 가정합니다.
MASCOT의 목표 지역은 Ryugu의 남반구에 있으며, 낮과 밤주기가 온화하고 착륙선을 다치게하지 않는 매끄러운 지역에 있습니다. 온도는 화씨 116도에서 화씨 89도 (섭씨 47도에서 섭씨 67도) 사이입니다.
거기에 도착하기 위해, Hayabusa2는 먼저 다이빙을합니다. 우주선은 약 12 마일 (20 킬로미터) 정도의 높이에서 류 구어를 공전했습니다. 그러나 MASCOT을 출시하기 위해 하야부사는 60 피트 (200 피트)의 물림을 줄입니다.
그러면 MASCOT은 통제되지 않고 무력한 Ryugu를 향해 홀로 넘어 질 것입니다. 그러나 이것은 자살 급락이 아닙니다. 소행성의 저 중력으로 인해, MASCOT의 하강은 초당 8 인치 (20 센티미터)만큼 빨라질 것입니다. DLR 관계자는 전형적인 성인 인간이 그보다 7 배 더 빨리 걷는다고 말했다.
MASCOT은 Hayabusa2를 떠난 후 10 분 이내에 Ryugu 표면을 처음으로 터치 다운합니다. 착륙선은 휴식을 취하기 전에 여러 번 튀어 오릅니다. 그것은 위험한 순간이 될 것입니다. MASCOT에 균열이 생길 수 있습니다. 또는 너무 높이 튀면 착륙선을 영원히 잃을 수 있다고 프로젝트 관리자 Tra-Mi Ho는 경고했습니다.
"매끄러운 강하가 중요하다. 그렇지 않으면, MASCOT은 중력이 낮고 우주 공간에서 손실되어 고무 공처럼 소행성에서 되돌아 올 것이다"라고 Ho는 말했다.

자체적으로 작업
MASCOT은 처음에 준비된 명령 시퀀스를 통해 자체적으로 작동합니다. 이 계획은 우주선이 자동으로 똑바로 세워지고 몇 시간 동안 스스로 측정하는 것입니다.
모든 것이 잘 진행된다면, 독일 쾰른에있는 MASCOT 제어 센터의 과학자들은 착륙선에 다른 관점을 갖기 위해 착륙선을 한 번 더 호핑하라고 요청할 수 있습니다. 이 경우 MASCOT은 약 10m (33 피트) 정도만 항해합니다. 과학 데이터 수집을 위해 배터리 수명을 보존하기 위해 수행되고 있습니다.
작은 22 파운드. (10 킬로그램) MASCOT은 4 개의 기기를 사용하여 데이터를 수집하고 착륙 후 며칠 후에 과학 데이터와 이미지를 집으로 보냅니다. 이 데이터에는 소행성의 광물학, 표면 온도 및 자기장의 측정이 포함됩니다.
DLR 관계자는이 우주선은 통신 창이 제한되어 있고 하야부사 2가 MASCOT의 착륙 및 운영 시점에 "거대한 양의 데이터"를 다시 보낼 것이기 때문에 몇 개의 업데이트 만 지구로 다시 보낼 것이라고 덧붙였다.
MASCOT 임무의 기간은 제한되어 있지만 Hayabusa2는 앞으로 몇 달 동안 더 많은 착륙선을 배치 할 것입니다. Ryugu에서 자체적으로 몇 가지 터치 다운을 수행합니다. Hayabusa2는 2019 년에 샘플을 손에 들고 소행성을 떠날 예정이며 2020 년 12 월에 지구로 돌아갈 예정입니다.