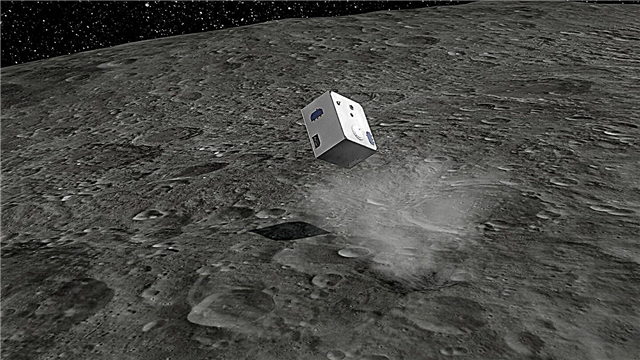
작은 화성 위성 포보스에서 일본의 화성 달 탐사 (MMX) 우주선의 예술가의 삽화.
(이미지 : © JAXA / NASA)
호핑 소행성 착륙선 인 MASCOT은 죽었을 수도 있지만 혈통은 계속 될 것이며 몇 년 후 화성 시스템을 탐험하게 될 것입니다.
로버는 2024 년에 발사 될 예정인 일본의 Martian Moons Exploration (MMX) 샘플 반환 임무에 통합 될 예정이며, 일본, 독일 및 프랑스 우주 관계자는 수요일 발표했다 (10 월 3 일).
이번 주 17 시간 동안 3,000 피트 (900 미터) 너비의 소행성 류구를 탐험 한 MASCOT과 마찬가지로, 새로운 로봇은 프랑스 우주국과 협력하여 독일 약어 DLR로 알려진 독일 항공 우주 센터 (German Aerospace Center)에 의해 만들어 질 것입니다. CNES. [일본의 하야부사 2 소행성 류구 미션 사진]
MMX는 2029 년에 14 마일 (22km)의 화성 달 포보스 샘플을 지구로 반환하는 것을 목표로합니다. 새로 발표 된 로버는이 작업을 용이하게하고 중요한 데이터를 수집 할 것입니다.
일본 항공 우주 탐사 국 (JAXA) 관계자는 "로버는 MMX 착륙 및 샘플 복귀 작업을 최적화하기 위해 표면 리골 리트 및 구성을 매우 상세하게 분석하는 것"이라고 DLR과 CNES 관계자는 수요일 공동 성명에서 밝혔다. ).
"이 과정은 임무 위험을 감소시킬뿐만 아니라 로버가 물리적 샘플을 지구로 반환하기 전에 표면 데이터를 획득함에 따라 과학적 결과를 달성 할 것으로 기대된다"고 관계자는 덧붙였다.
MMX 임무의 주요 목표는 화성의 다른 달인 포보스와 데이모스의 기원을 결정하는 것입니다. 과학자들은 두 달이 어디에서 왔는지 확신하지 못한다. 예를 들어 어떤 이들은 소행성으로 포획되었다고 생각하는 반면 다른 이들은 그들이 강력한 영향으로 붉은 행성에서 폭발 한 물질로 구성되어 있다고 생각합니다.
우주 당국자들은 새로 발표 된 로봇이 소행성 호퍼를 따라갈 것이라고 선언하면서 MASCOT (이하 "모바일 소행성 표면 스카우트"의 줄임말)을 구체적으로 인용했다. 그러나 MMX 로봇은 MASCOT 클론이 아닙니다.
예를 들어, Phobos 표면 공예는 태양열로 작동하여 위성의 크레이트 표면에서 몇 달 동안 작동 할 수 있습니다. 반면, MASCOT은 비 충전식 리튬 이온 배터리를 사용했습니다.

그리고 성명서는 MASCOT을 착륙선이라고 부르지 만 새로운 로봇을 로버라고 반복해서 언급하며, 두 로봇의 이동 방법 (또는 빈도)에 상당한 차이가있을 수 있음을 시사합니다. (즉, 화성의 달의 낮은 중력 환경을 고려할 때 포보스 봇도 뛸 것입니다.)
MASCOT은 JAXA가 이끄는 1 억 5 천만 달러의 Hayabusa2 임무를 타고 류 구로 날아갔습니다. Hayabusa2 모선은 지난 달 MINERVA-II1A와 MINERVA-II1b로 알려진 두 개의 작은 태양열 호퍼를 배치했습니다. 이 작은 동료들은 오늘날 류 구의 표면에서 활발히 활동하고 있습니다.
Hayabusa2는 또한 샘플 반환 임무입니다. 모든 계획에 따르면, 모선에 의해 납치 된 류 구어 자료는 2020 년 12 월에 지구로 돌아올 것입니다.
외계 생명체 검색에 관한 Mike Wall의 저서 "Out There"는 11 월 13 일에 출판 될 예정입니다. Twitter @michaeldwall 및 Google+에서 팔로우하십시오. @Spacedotcom, Facebook 또는 Google+를 팔로우하십시오. 원래 Space.com에 게시되었습니다.