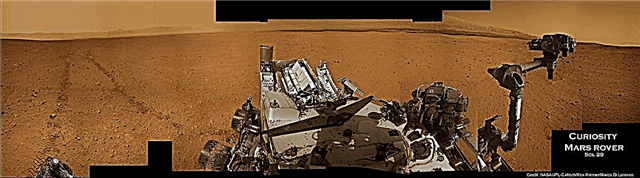
이미지 캡션 : 게일 분화구 내부의 화성에 대한 호기심. 타임 랩스 이미지는 왼쪽의 포스트 구동 휠 트랙, 샤프 산이있는 포인팅 기기 터릿, 중앙에 호기심의 기기 포장 된 데크 탑의 자화상으로 로봇 팔의 적재 위치에서 배치 위치로 로봇 팔의 움직임을 강조합니다. 이 채색 된 모자이크는 Sol 29에서 고정적으로 시작하는 동안 여러 화성의 날에 찍은 내비게이션 카메라 (Navcam) 이미지로 조립되었습니다. 확대하려면 클릭하십시오. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
NASA의 Mega Martian Rover Curiosity는 Gale Crater 내부의 Red Planet의 과학이 풍부한 지형을 신속하게 트레킹하고 있습니다 .8 월 5 일에 대담한 대기 급락과 핀 터치 터치 다운 이후 2 월 주년이 다가옵니다. 날카로운.
이 매우 짧은 시간 동안, 호기심은 이미 3 곳의 다른 위치 (착륙장에서 그리고 횡단 경로를 따라 멈춤)에서 고대 화성 스트림 침대에 대한 증거를 발견함으로써 삶의 징후와 잠재적으로 거주 가능한 환경을 찾는 목표를 달성했습니다. – 한때 수십억 년 전에 고관절의 깊은 액체 물이 활발하게 흘러갔습니다. 액체 물은 생명의 기원을위한 전제 조건입니다.
호기심은 대기업의 암석층에 돌로 된 돌 노치의 삼중주를 발견했습니다. 처음에는 착륙 추진기에 의해 노출 된“Goulburn”수세식과 나중에 임무의 첫 40 솔 동안“링크”와“호타”노두에서 발견되었습니다.
그들이 다른 물 관련 노두를 찾으면, Curiosity Mars Science Laboratory (MSL) 프로젝트 관리자 인 John Grotzinger는 로봇 팔이 그것을 조사하기 위해 배치 될 것이라고 말했습니다.
“우리는 모든 무기 기반 접촉 과학을 먼저 수행 한 다음 드릴 여부를 결정합니다. 그래도 확실하지 않다면 여전히 고의로 검토 할 시간이 있습니다.”라고 Grotzinger는 말했습니다.

이미지 캡션 : 화성에있는 고대 스트림 베드의 잔해. NASA의 호기심 로버는 캐나다 북서부 지역의 Hottah Lake에 이어 과학 팀이 '호타 (Hottah)'라고 명명 한 이곳의 암석 노두를 포함하여 몇 곳에서 화성에 흐르는 고대의 흐름에 대한 증거를 발견했습니다. 보도가 부서진 것처럼 보일지 모르지만, 화성에있는이 지질 학적 특징은 실제로 작은 조각들로 구성된 기반암에 노출되어 있거나 지질 학자들이 퇴적물 대기업이라고하는 것입니다. 과학자들은 기반암이 과거에 붕괴되어 운석에 의한 충격을 통해 제목 각도를 제공한다고 이론화했습니다. 이 이미지 모자이크는 Sol 39 (2012 년 9 월 14 일)의 100mm Mastcam 망원 렌즈로 촬영했습니다. 크레딧 : NASA / JPL-Caltech / MSSS
“이것이 우리가 화성에서 실제로 물 수송 자갈을 본 것은 이번이 처음입니다. 이것이 버클리 소재 캘리포니아 대학의 호기심 과학 공동 수사관 윌리엄 디트리히 (William Dietrich)는 말했다.

이미지 캡션 : 호기심은 화성의 "Jake"rock에서 1 차 접촉 과학 실험을 수행합니다. Sols 44에서 47까지의이 360도 파노라마 모자이크 이미지 (Sept 20-23)는 Sol 44의 Jake rock 근처에 도착한 호기심을 보여줍니다. 로봇이 가까이 다가갔습니다. Sol 47의 삽입 이미지는 로봇 팔이 과학 장비를 암석에 놓고 팔 말단의 터릿에 위치한 장비로 화성암에 대한 첫 번째 세부 접촉 과학 검사를 수행하도록 확장 된 것을 보여줍니다. Jake rock은 최근 사망 한 팀원 인 Jake Matijevic을 기리기 위해 지명되었습니다. 이 모자이크는 Jake와 그의 뛰어난 공헌에 대한 찬사로 만들어졌습니다. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
1 톤 로봇은 곧“브래드버리 랜딩”의 터치 다운 근처에서 출발하여 팀이“Glenelg”라고 불렀던 첫 번째 과학 목표를 향해 일주일에 걸쳐 동쪽으로 이동했습니다.
NASA 원시 이미지에서 Ken Kremer와 Marco Di Lorenzo가 만든 다양한 솔에서의 로버 움직임을 보여주는 파노라마 호기심 모자이크를 여기에서보십시오.
호기심은 이제 그녀가 최첨단 화성 토양 재료를 퍼 내고 화학 실험실에 샘플을 전달하기 위해 2.1 피트 길이의 고급 로봇 팔로 손을 뻗을 수있는 자리에서 문을 닫고 있습니다.
캘리포니아 파사 데나에있는 Caltech의 Grotzinger 기자는 9 월 27 일 브리핑에서 브리핑 연구원은 분석 실험실에 쉽게 걸러 낼 수있는 다음 몇 졸 내에서 느슨하고 자갈이 많은 화성 토양을 수집하기에 적합한 장소를 찾고자한다고 말했다. 호기심은 글 레넬 그로 가기 전에 귀중한 재료와 주변 환경을 조사하는 데 약 2-3 주가 소요됩니다.
과학 팀은 글 레넬 그를 세 가지 다른 유형의 지질 지형의 교차점에 위치하여 연구원들이 게일 분화구 상륙지에 도착하기 오래 전에 게일 분화구 상륙 장 내부의 다양한 지질을 종합적으로 탐색 할 수있는 기회를 제공하기 때문에 상세한 조사를위한 첫 번째 목표로 선택했습니다. 샤프 산. 로버 팀은 호기심이 화성 까마귀가 날아갈 때 약 10 킬로미터 (6 마일) 떨어진 샤프 산에 도착하기까지 1 년 이상 걸릴 것으로 예상하기 때문에 중요합니다.
현재 Sol 53의 Curiosity는 총 거리가 0.28 마일 (0.45 킬로미터) 또는 Glenelg로가는 길이의 3 분의 2 이상을 주행했습니다. 6 륜 로봇 인 예스터 솔 (Sol 52)은 글레 넬그 (Glenelg) 지역을 향해 약 37.3 미터 (122 피트) 정도 주행했으며, 시각적 주행 거리 측정법을 사용하여 진행 상황을 평가하고 모래 함정이나 기타 위험한 장애물을 암시 할 수있는 바퀴 미끄러짐을 조정합니다.
지금까지 가장 긴 드라이브는 로봇이 48.9 미터 (160 피트) 회전하는 Sol 50에서 발생했습니다.
최근 호기심은 3 세대 NASA의 Mars rovers에서 핵심적이고 주요한 역할을 수행 한 MSL 팀원 인 Jake Matijevic을 기리기 위해“Jake”라는 암석에서 로봇 팔로 첫 번째 암석 접촉 과학 조사를 실시했습니다. Jake Matijevic를 기리기 위해 제작 된 360도 파노라마 "Jake rock"모자이크를보십시오.
호기심은 화성에서 과거 또는 현재의 미생물 생활에 유리한 수화 된 미네랄, 유기 분자 및 서식지의 흔적을 찾고 있습니다.

이미지 캡션 : "Hottah"물 관련 노출. 콘텍스트 모자이크는 백그라운드에서 샤프 산이있는 Sol 38의 Curiosity Navcam에 의해 이미지 된 게일 분화구 바닥에서 튀어 나온 Hottah”노출 (오른쪽 하단)의 위치를 보여줍니다. Glenelg 과학 목표는 Sharp 산을 향한 지형에 있습니다. 이것은 우주 비행사 지질학자가 화성에서 볼 수있는 것입니다. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo

물이 다운 슬로프를 흐르는 충적 팬. 이 이미지는 NASA의 호기심 로버가 8 월 5 일 PDT (8 월 6 일 EDT)에 착륙 한 지역 주변에 음영이 추가 된 지형을 보여줍니다. 검은 색 타원형은 "랜딩 타원"으로 알려진 로버의 대상 착륙 영역을 나타내고 십자가는 로버가 실제로 착륙 한 위치를 보여줍니다. 더 잘 볼 수 있습니다. 지구상에서 충적 팬은 종종 물이 흘러 내리는 경사로 형성됩니다. 바위가 많은 노두가 묻힌 둥근 자갈의 호기심에 대한 새로운 관측은 물이 화성 에이 지역에서 흘러서 충적 팬을 생성한다는 구체적인 증거를 제공합니다. 크레딧 : NASA / JPL-Caltech / UofA