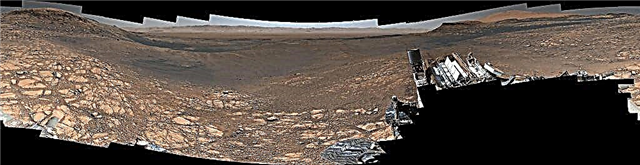
화성의 호기심 로버는 붉은 행성 표면에서 촬영 한 가장 상세한 파노라마 이미지를 포착했습니다. 이미지는 2.43GB의 고해상도 행성 선량으로 18 억 화소의 화성 풍경을 포함하는 1,000 개가 넘는 이미지로 만들어집니다.
Curiosity 프로젝트 과학자 인 Ashwin Vasavada는“이번 임무는 우리가 처음으로 360도 스테레오 파노라마 작업에 전념하는 임무 중 처음입니다.
로버는 2012 년 8 월부터 화성 게일 분화구에있었습니다.
NASA와 JPL은 사진을 확대하거나 축소 할 수있는 특별한 기능과 함께 장면의 비디오를 아래에 정리했습니다.
파노라마는 2019 년 11 월 24 일에서 12 월 1 일 사이에 미국에서 추수 감사절 휴일 1 주일 동안 촬영되었습니다. NASA는 로버가“팀이 돌아와서 다음 명령을 제공하기를 기다리는 동안해야 할 일이 거의 없다”고 말했다. 로버는 며칠 동안 같은 유리한 지점에서 주변 환경을 이미지 할 수있는 기회가 거의 없었습니다.”
Vasavada는“우리 팀의 많은 사람들이 집에서 칠면조를 즐기고 있지만 호기심은이 축제를 눈으로 만들어 냈습니다.
이미지는 호기심이 탐험하고있는 샤프 산의 측면 인 글렌 토리 돈의 파노라마 사진입니다. 이 로버는 망원 렌즈를 사용하여 파노라마를 생성하기 위해 로버의 마스트 카메라 또는 마스트 캠을 사용하여 4 일 동안 6 시간 반 이상 노출되었습니다.
Mastcam 운영자는 복잡한 작업 목록을 사전에 프로그래밍했으며 여기에는 로버의 돛대를 가리키고 이미지의 초점이 맞춰 졌는지 확인하는 것이 포함됩니다. 사진은 정오와 오후 2시 사이에 촬영되었습니다. 일관된 조명을 보장하는 현지 화성 시간.

Mastcam은 또한 중간 각도 렌즈를 사용하여 로버의 데크와 로봇 팔을 포함하는 약 650 만 화소의 저해상도 파노라마를 제작했습니다.
그 후 몇 주 동안 로버 이미징 팀이 이미지들을 힘들게 꿰매 었습니다. 각 사진의 가장자리를 혼합하여 완벽한 모양을 만듭니다.
비디오에서 Vasavada는“이 파노라마에서 내가 좋아하는 것은 우리가 멀리서 확대하여 세부 사항을 볼 수 있다는 것입니다. "그것을 시작하면 우리가 안에있는 분화구의 가장자리를 북쪽으로 볼 수 있습니다."
그는 다음과 같이 덧붙입니다.“여기에 인상적인 광경이 있습니다. 20 마일 떨어진 곳은 게일 분화구 가장자리에있는 속어 포 분화구입니다. 끝까지, Slangpos는 3 마일 너비입니다! 거대한 무언가가 여기에 쳤을 것입니다. 화성이 친숙해 보인다고 생각할 때마다이 극적인 충돌 분화구와 같은 광경은 우리가 다른 행성을보고 있다는 것을 상기시켜줍니다.”
Curiosity가 촬영 한 다음 고해상도 사진은 2013 년 130 억 화소의 파노라마 사진을 제작 한 당시였습니다.
그리고 다른 로버 뉴스에서 오늘 NASA는 화성 2020 로버에 선택된 이름을 발표 할 것입니다. 우주국은 네이밍 콘테스트를 열었고 미국 전역의 28,000 명 이상의 K-12 학생들이 NASA의“이름은 로버”라는 전화에 응답했습니다.