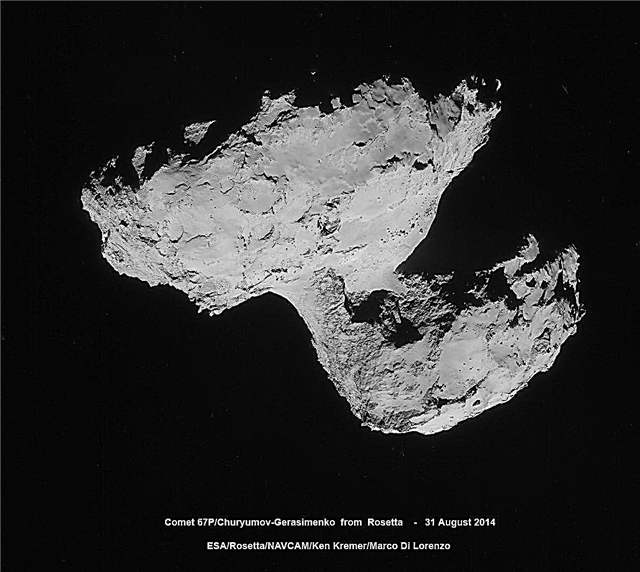
혜성 67P / Churyumov-Gerasimenko에서 61km 떨어진 Rosetta의 내비게이션 카메라로 찍은 이미지로 구성된 4 개 이미지 사진 모자이크. 혜성 핵은 약 4km입니다.
크레딧 : ESA / Rosetta / NAVCAM / Ken Kremer – kenkremer.com/Marco Di Lorenzo
아래에서 회전 된 버전 및 4 개의 개별 이미지보기 [/ caption]
ESA의 Rosetta 궤도 선은 이제 혜성 채석장에 너무 가까이 다가 가서 원시 몸체가 화면을 압도하므로 기괴한 세계의 완전한 장면을 포착하기위한 스냅링 매핑 모자이크가 순간 Philae 착륙에 가장 적합한 지점을 찾을 수 있습니다. 11 월 중순에 예정되어 있습니다.
실제로 Rosetta는 8 월 31 일 일요일 navcam 카메라로 67P / Churyumov-Gerasimenko Comet 67P의 고해상도 뷰를 수집하기 위해 혜성을 '그리기 및 분기'했습니다.
navcam 4 중주는 오늘 2014 년 9 월 1 일 월요일 Rosetta 포털에 게시되었습니다. ESA는 독자들에게 글로벌 사진 모자이크를 만들도록 초대했습니다.
Rosetta가 8 월 31 일에 찍은 navcam 이미지의 네 프레임 사진 모자이크를 참조하십시오.
스펙트럼과 물리적 측정뿐만 아니라 이미지를 촬영하는 목적은 안전하고 과학적으로 흥미로운 '기술적으로 실현 가능한'Philae 터치 다운 사이트를 찾는 것입니다.
아래는 2 x 2 래스터로 개별적으로 배열 된 Rosetta 팀 4 개의 이미지 navcam 몽타주입니다.

navcam 이미지 래스터 시퀀스는 혜성 67P에서 61km 떨어진 곳에서 가져 왔습니다.
“4 개의 이미지 각각의 모서리에는 혜성의 1/4이 거의 보이지 않습니다. 4 개의 이미지는 약 20 분 동안 촬영되는데, 이는 우주선의 움직임과 이미지 사이의 혜성의 회전이 있음을 의미합니다. 결과적으로, 네 가지 이미지 중 깨끗한 모자이크를 만드는 것은 간단하지 않습니다.”라고 ESA의 Rosetta 블로그에 따르면.
지난주에 보도 한 바와 같이, Rosetta 궤도를 향한 '상위 5'상륙지 후보가 Philae 착륙선을 인류의 첫 혜성에 착륙시키기 위해 피기 백했습니다.
잠재적 인 터치 다운 사이트는 2014 년 8 월 6 일에 혜성 67P / Churyumov-Gerasimenko에 도착한 이후 지난 주 동안 ESA의 Rosetta 우주선이 수집 한 고해상도 측정에 대한 철저한 분석을 기반으로 8 월 25 일에 발표되었습니다.
아래 'Top 5'방문 사이트의 몽타주를 참조하십시오.

Rosetta는 역사상 최초의 장기 연구를 위해 혜성을 공전하려는 최초의 시도를 포함하여 많은 첫 번째 임무입니다.
혜성 67P에 착륙 한 Philae의 역사는 현재 2014 년 11 월 11 일경에 예정되어 있으며 완전히 자동으로 진행됩니다. 100kg 착륙선에는 10 개의 과학기구가 장착되어 있습니다.
오늘 출시 된 새로운 이미지는 Navcam 카메라로 지금까지 가장 잘 촬영되었습니다. 프로브 OSIRIS 과학 카메라는 더욱 상세하며 곧 ESA에서 출시 될 예정입니다!
ESA 성명서에서 DLR (German Aerospace Center)의 랜더 매니저 인 스테판 울 라멕 (Stephan Ulamec)은“혜성에 착륙하는 것이 처음이라고 생각했다.
로베타를 이끄는 과학 및 엔지니어링 팀의 최우선 과제는 Philae 혜성 착륙선을위한 착륙선 찾기였습니다.
“혜성이 따뜻해지고 태양이 가까워 질수록 표면이 더욱 활발 해져서 착륙이 더욱 위험 해지기 때문에 적절한 착륙장을 선택하기 위해 시계가 똑딱 거리고 있습니다.

다리가 3 개인 착륙선은 작살 2 개를 발사하고 얼음 나사를 사용하여 4 킬로미터 (2.5 마일) 너비의 혜성 표면에 고정합니다. Philae는 스테레오 및 파노라마 이미지를 수집하고 23cm를 뚫고 엄청나게 다양한 표면을 샘플링합니다.
Ken의 지속적인 Rosetta, 지구 및 행성 과학 및 인간 우주 비행 뉴스에 대해 계속 지켜봐 주시기 바랍니다.


내 로제타 시리즈를 읽으십시오 :