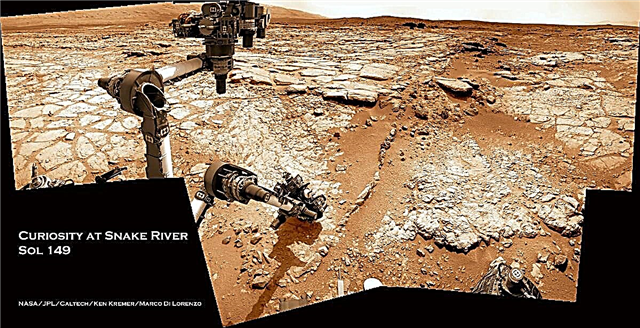
이미지 캡션 : 타임 랩스 모자이크는 Sol 149의 호기심 로버의 팔 움직임을 보여줍니다 (1 월. 로버 팀은 곧이 대리 목에서 역사적인 최초의 암반 드릴링을 수행 할 것입니다. 호기심은 이제 바로 위의 더 크고 부서진 암석으로 이끌었습니다. 스네이크 리버 (Snake River) 암석의 오른쪽, Photomosaic은 Navcam 원시 이미지에서 스티칭되었으며 이미지 틈을 메우기 위해 추가 된 하늘 패치로 채색됩니다 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
화성 과학자 및 엔지니어 팀은 지난 몇 주 동안 로봇의 현재 위치에서 '노란 나이프 베이 (Yellowknife Bay)'로 알려진 얕은 우울증 내에서 로봇의 현재 위치를 신중하게 고려한 후 NASA의 호기심 로버의 첫 번째 암석 드릴링 목표를 선택했습니다. 밝은 톤의 바위.
이 보고서의 출처에 따르면, 이번 주 화요일에 추가 정보가 담긴 공식 NASA 발표가있을 예정입니다.
호기심은 이제 '스네이크 리버 (Snake River)'라고 불리는 석회암 체인 주변의 주변에 대한 과학적 평가를 실시하고 있으며, 모래에 흩어져있는 화성 바닥에서 튀어 나와 있습니다. 여기 위와 아래 및 이전 이야기의 사진 모자이크를보십시오.
시추는 임무의 핵심으로 진행되며, 행성 탐사에서 역사적인 업적을 표명 할 것입니다. 처음으로 다른 행성의 암석 내부에서 토착 샘플을 채취 한 다음 화학 성분 분석기로 원소 성분을 결정하고 유기 분자가 있는지 확인하십시오.
드릴 대상 선택에 대한 첫 번째 보고서는 NASA Watch / Spaceref의 Craig Covault가 기사에서‘Snake River’타임 랩스 모자이크 (Ken Kremer 및 Marco Di Lorenzo 제공) 기사를 게시한지 하루 전입니다. 모자이크는 팔이 실제 과학 장비를 배치하고 회전하여 MAHLI 현미경 이미 저로 사진을 캡처하고 APXS 미네랄 분광계와 과학을 접촉하도록 보여줍니다.
정확한 시추 지점은 공개되지 않았지만 '스네이크 리버 (Snake River)'근처에 있으며 Sol 149 및 이전 Sols의 모자이크에서 'Yellowknife Bay'분지 내부에서 볼 수 있습니다. 교차 침구가 보이고 건조 된 해안선을 연상시킵니다. 호기심은 이제 밀접한 접촉 과학 조사를 위해 구불 구불 한 '뱀 강'암석의 바로 위의 더 크고 부서진 암석으로 이동했습니다.

이미지 캡션 : Snake River 근처의 Sol 150 (2013 년 1 월 6 일)에서 Curiosity의 먼지 제거 도구 (DRT)로 1st rock brush off 이미지를 비교 한 전후. 고해상도 Mastcam 100 카메라로 촬영 한 이미지, 대비가 향상되었습니다. "Ekwir_1"이라는 솔질 된 바위 표적 패치는 약 1.85 인치 x 2.44 인치 (47 밀리미터 x 62 밀리미터)입니다. 크레딧 : NASA / JPL-Caltech / MSSS / Ken Kremer
Mars Science Lab (MSL) 팀은 최고의 시추 및 NASA 관리팀과 협력하여 선택한 시추 장소에 대한 승인을 받거나 다른 암석을 선택합니다.
고성능 해머 드릴은 2.1m (7 피트) 길이의 기계식 암에서 자동차 크기 로봇의 끝에있는 공구 터렛에 있습니다.
타악기 훈련은 Curiosity의 최첨단 과학 도구 10 가지 중 마지막 구성 요소이며,이를 확인하고 실행해야합니다.
첫 번째 시험 구멍에서 채취 한 암석 샘플을 분쇄하고 분말 혼합물을 사용하여 드릴 메커니즘의 내부 챔버를 헹구고 잔류 토양 오염물을 정화 한 다음 덤프합니다. CHIMRA 시료 처리 시스템을 정화하기 위해 초기 토양을 뿌린 바람막이 'Rocknest'잔물결에서 동일한 절차를 수행했습니다.
따라서 체질 된 샘플이 무기 및 유기 화학 성분의 분석을 위해 로버 데크의 CheMin 및 SAM 분석 화학 실험실로 전달 될 때까지 몇 주가 걸리고 한 달 이상이 걸릴 수 있습니다.

이미지 캡션 : 사진 모자이크는 NASA의 호기심 화성 로버가 2012 년 12 월 19 일 Sol 132의 옐로 나이프 베이 내부 지점에서 암석을 조사하기 위해 손을 뻗고 있음을 보여줍니다. 첫 번째 드릴링 대상을 찾기 위해 로버는 스네이크 리버 록. Curiosity의 내비게이션 카메라는 팔이 배치 된 상태에서 로버를 둘러싼 장면과 이미징 및 X- 선 분광 데이터를 수집하는 툴 터릿의 APXS 및 MAHLI 과학 장비를 캡처했습니다. 오른쪽에서 샤프 산의 기초가 보입니다. 틈을 메우기 위해 추가 된 하늘 패치로 모자이크가 채색됩니다. 클릭하면 확대됩니다. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Sol 150 (1 월 6 일)의 전주곡으로, 로버는 Honeybee가 만든 먼지 제거 도구 (DRT)의 전동 와이어 브러시를 사용하여 Snake River 주변의 평평한 바위 중 하나를 처음으로 성공적으로 닦았습니다. NYC의 로봇 공학.
솔질은 'Ekwir_1'이라는 암석 대상에서 완성되었습니다. Mastcam-100 고해상도 컬러 카메라로 찍힌 암석 표면 이미지의 비교 전후를 모자이크로 확인하십시오.
칫솔질은 암반 시추 전에 중요한 단계이며 먼지 블랭킷 암석의 가려진 시야에 비해 과학 장비를 사용하여 암석 구성에 대한 통찰력을 훨씬 쉽게 얻을 수 있습니다. Spirit & Opportunity는 또한 Honeybee Robotics에서 브러시를 제작하여 수년 동안 기적적인 일생 동안 계속 견뎌냈습니다.
MSL 팀 멤버 인 Ken Herkenhoff는 팀이 로버에게“로버 앞의 약간 더 작은 암석”에 조금 더 가까이 다가 가도록 명령했습니다.
“현재 위치의 접촉 과학 활동은 표면의 첫 번째 솔질을 포함하여 잘 진행되었습니다. 옐로 나이프 베이 가장자리에있는 암석의 지질과 화학 특성을 분석하기 위해 Sol 152에서 시작하는 새로운 위치에서 칫솔질, APXS, MAHLI, ChemCam 및 Mastcam 활동을 반복 할 계획입니다.”
Herkenhoff는“Snake River 근처의 암석에서 화학적 및 조직적 차이를 연구하고 있습니다.
Sol 152 (1 월 8 일)에서 호기심은 '스네이크 리버'주변 지역에서 2.5 미터 더 가까이 가서 고해상도 컬러 이미지를 찍기 시작했습니다.
캘리포니아 공과 대학 (California Institute of Technology)의 수석 과학자 존 그로 징거 (John Grotzinger)는“이것은 퍼즐의 한 조각이다. "이것은 주변 암석과의 교차 절단 관계를 가지고 있으며 그것이 통과하는 층의 증착 후에 형성된 것으로 보인다."
호기심은 수십억 년 전에 환경이 따뜻하고 습해졌으며 생명의 기원에 훨씬 더 도움이되는 붉은 행성의 고대 역사를 엿볼 수있는 일종의 타임머신이기 때문에 Grotzinger와 팀은 매우 흥분합니다.

이미지 캡션 : 다이어그램은 로봇 팔의 툴 터릿에있는 모든 기기를 보여줍니다. 크레딧 : NASA