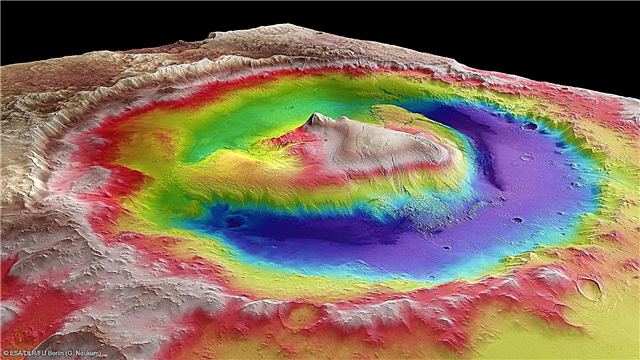
우주 잡지는 NASA의 1 톤의 호기심 화성 로버가 신비한 샤프 산의 산기슭에있는 고대 퇴적층으로의 멋진 여행을 시작하면서 NASA의 제트 추진 연구소 (JPL)의 호기심 프로젝트 관리자 Jim Erickson과 독점 인터뷰를 진행했습니다. 로봇의 다른 세상 모험에 대해 이야기하기 위해 최신 특종.
과학 및 엔지니어링 팀은 현재 1 년 동안 약 5.5km 높이의 화성 산으로 향하는 로버의 여행을 서두르 기 위해 노력하고 있습니다.
"우리는 Glenelg와 Shaler 노두를 떠나서 Sharp 산을 시작했습니다."라고 Erickson은 말했습니다.
전반적으로 6 륜 로버는 붉은 행성을 가로 지르는 로빙에서 1 킬로미터 (0.62 마일)를 넘어 섰습니다.
화성 까마귀가 날아 가면서 샤프 산은 약 8km 떨어진 곳에 있습니다.

호기심은 겹쳐 쌓인 산으로 향하는 긴 길의 위험한 모래 언덕을 가로 질러 가야합니다.
Erickson은“일이 잘 진행되고 있으며 벨트 아래에 몇 개의 드라이브가 있습니다.
호기심은 글레 넬그 (Glenelg)와 옐로 나이프 베이 (Yellowknife Bay)에서 반년 이상의 가치있는 과학을 완성하여 화성 미생물을 유지할 수있는 화학 성분으로 붉은 행성에서 거주 할 수있는 환경을 발견함으로써 이미 NASA의 화성에 대한 주력 임무의 목표를 달성했습니다.
호기심의 처리자들은 2012 년 8 월 6 일 거의 1 년 전 게일 분화구 (Gale Crater)에서 숨이 막히는 터치 다운 이후 로버트 '브레인'을 새로운 운전 소프트웨어로 업그레이드하여 전보다 똑똑하고, 생산성이 높으며, 더욱 독립적이되었습니다.
“우리는 정기적으로 운전을 계속합니다. 다음 드라이브는 내일 계획되어 있으며 다음 날에 실행될 것입니다.”
7 월 17 일 (Sol 336) 7 월 4 일 현재, 7 월 4 일 Glenelg (Sol 324)를 떠난 후 호기심은 6 번이나 증가하여 총 180 미터가 넘었습니다.

과학자들은 게일 분화구 (Gale Crater)와 샤프 산 (Mount Sharp)에게 호기심을 표적으로 삼았습니다. 중성 수에 형성되는 점토 광물질이 쌓여 있고 과거 나 현재의 단순한 화성인 생명체의 기원과 진화를 뒷받침 할 수 있기 때문입니다.
Erickson은 Viking으로 거슬러 올라가는 많은 NASA 행성 과학 임무에서 주요 직책을 수행했습니다. 여기에는 MER 로버의 정신 및 기회뿐만 아니라 화성 정찰 궤도 (MRO)와의 갈등도 목성의 갈릴레오 임무가 포함됩니다.
다음은 JPL의 Curiosity 프로젝트 관리자 인 Jim Erickson과의 광범위한 대화의 1 부입니다. 파트 2가 이어집니다.
나는 Erickson에게 자율 주행 (autonomous navigation) 또는 자동 탐색 (autonav)이라고하는 새로운 운전 소프트웨어와 그것이 호기심을 빠르게하는 데 어떻게 도움이 될지를 설명해달라고 요청했다. 지금까지 지구의 엔지니어들은 그녀를 위해 대부분의 계획을 수행했습니다.
짐 에릭슨 (Jim Erickson) : 2013 년 3 월에 연결 기간이 끝난 직후에 자동차에 자동 탐색 또는 자율 내비게이션이라고하는 새로운 소프트웨어를 설치했습니다. 이로 인해 운전 능력이 향상 될 것입니다.
우리가 그것을 탑재 한 이유는 우리가 샤프 산으로 긴 드라이브를 시작할 때 도움이 될 것이라는 것을 알았 기 때문입니다. 그리고 우리는 그것을 확인하고 싶어합니다. 다음 몇 주 동안 자동 탐색으로 다양한 테스트를 수행 할 것입니다.
Ken Kremer : 자동 탐색 기능이 호기심을 어떻게 도울까요?
Jim Erickson : 로버는 운전 거리, 미끄러짐 여부를 이해하고 안전을 향상시킬 수 있습니다.
그리고 다음 단계는 로버가 스스로 운전할 수 있도록하는 효과가 있습니다.
Ken : 호기심은 얼마나 자주 운전합니까?
짐 에릭슨 : 매일 다른 곳 에서처럼. 우리는 드라이브를 계획하고, 어떻게 진행되는지, 잘 작동했는지 확인한 후 다음 드라이브로 넘어갑니다. 우리는 autonav의 체크 아웃을 수행하는 동안 그대로 구현하고 있습니다.
테스트를 완료하기 위해 자동 탐색 체크 아웃의 일부로 운전을 중지해야 할 수도 있습니다.
기본적으로 우리는 주로 전날의 운전을 성공적으로 완료 한 날 수에 의해 제한됩니다. 정보가 있는지 [지구로] 돌아와서 다음 날의 운전 계획을 세울 수 있습니다.
어떤 상황에서는 화성 시간이 회전하여 데이터를 제 시간에 다시 얻지 못하므로 그날 운전하지 않습니다.
Ken : 이틀 연속 운전할 수 있습니까?
Jim Erickson : 타이밍이 맞다면 가능합니다. 우리가 그 날의 주행 결과 (n)를 시간 내에 얻는다면, 마치 다음 날의 주행 (n + 1)을 계획해야합니다 – 마치 마치 마치 화성에있는 것처럼. 그러면 잘 작동합니다.
또한 자동 탐색 기능을 사용하면 2 일 연속으로 계획 할 수 있습니다. 하루는 직접 운전하고 두 번째 날은‘여기서 어디에서나 목표를 정하십시오.이 지점으로 가십시오.’입니다.
생산성이 향상됩니다!
Ken : 자동 탐색 기능은 언제 실행됩니까?
짐 에릭슨 : 2 ~ 3 주 정도. 자동 탐색에 익숙해 지려면 모든 테스트를 철저히 검토하고 먼저 확인해야합니다.
켄 : 게일 분화구 바닥의 화성 지형은 지금과 몇 마일입니까?
Jim Erickson : 모래와 다른 판석 지역이 혼합되어 있습니다. 우리가 들어가면서 두 가지 모두를 편안하게 운전할 수 있어야합니다. 현재 큰 문제가 될 큰 암석이 너무 많지 않습니다. 우리가 갈 선반 공간이 있습니다.
지금 우리가있는 지역은 실제로 장애물을 식별하고 그 주위를 돌아 다니는 연습을 해주면 좋습니다. 이것은 나중에 장애물을보고 더 빨리 운전하고 싶을 때 도움이 될 것입니다.
Ken : 현재 전체 계획은 무엇입니까? 운전 또는 중지 및 조사에 중점을두고 있습니까?
Jim Erickson : – 멈추려는 의도는 아닙니다. 이것은 좋은 몇 주 운전이 될 것입니다.
Jim Erickson과의 대화 파트 2에서는 과학 금광과 잠재적 인 데스 트랩 인 외계 영토를 가로 지르는 로버의 횡단, 드릴링 및 샘플링 활동, 혜성 ISON 관찰 및 다가오는 과학 목표에 대해 자세히 설명합니다.
화성에서 로버에 대한 이전의 경험은 로버가 사 구장과 상호 작용하는 방법을 연구하는 데 큰 도움이 될 것입니다. Autonav는 MER 로버에서 처음 사용되었습니다.
로버 드라이버와 과학 팀은 많은 경험을 쌓았으며 다양한 구성과 복잡성의 거대한 모래 언덕을 통해 정신과 기회를 모두 운전하는 방법을 알고 있습니다.
화성에서 더 많은 것을 기대하십시오.