화성 탐사 로버는 현재 거의 5 년 동안 붉은 행성의 표면을 가로 지르고 있습니다. 그러나 두 개의 로버, 정신과 기회는 정확히 1 억 5 천만 킬로미터 떨어진 지구에서 어떻게“구동”되어 있습니까? 우리 중 많은 사람들이 리모컨 장난감에 사용되는 것과 비슷한 조이스틱에 대한 비전을 가지고있을 수도 있지만 전혀 그렇지 않습니다. 그러나“로버 드라이버”는 비디오 게임 및 시뮬레이션 소프트웨어에 대한 경험이 있으면 이력서가 좋아 보이는 일 중 하나입니다! 스콧 맥스웰 (Scott Maxwell)은 14 명의 로버 드라이버 또는 계획 자라고도하며 지난 주에 스피릿과 기회의 상태에 대한 업데이트를 주었다. 오늘 Scott은 화성 탐사선을 운전하는 방법에 대한 세부 정보를 제공합니다.
JPL과의 전화 인터뷰에서 Scott은“우리가 원하는 방식으로 작동하면 조이스틱을 앞으로 움직일 수 있고, 로버가 앞으로 움직이거나 뒤로 밀면 로버가 멈출 수있는 조이스틱을 사용할 수있을 것입니다. 그러나 무선 신호의 지연 시간 지연으로 조이스틱을 앞으로 밀면 10 분 후에 로버가 신호를 수신하게됩니다. 하지만 지구상에서 신호가 다시 회복되는 데 걸리는 시간 때문에 10 분 후 다시 작동했는지 알 수 없습니다.”
운전자가 로버가 실시간으로하는 일을 "볼"수 없기 때문에 물류, 계획 및 운영에 악몽이 될 것입니다. 대신 로버 운전자는 화성의 야간 근무를합니다.

Scott은“우리는 태양열 동력 로버가 밤 동안 셧다운되어야한다는 이점을 활용합니다. “화성의 하늘에서 해가지고있을 때, 로버는 주변 세계의 사진을 찍어 잠들기 전에 보내라는 명령을받습니다. 우리가 그 데이터를 지구에 다시 가져 오면 일을 시작합니다. 모든 이미지를 가져 와서 시뮬레이션에 넣습니다. 우리 컴퓨터에는 3D 시뮬레이션 세계 (비디오 게임과 같은)가 있습니다. 그런 다음 우리는 3D 세계에 내려 놓은 시뮬레이션 로버를 가지고 대신 그 로버를 움직입니다.”
따라서 3D 세계에서 로버 운전자는 모든 가능성을 테스트하고 모든 실수를 할 수 있습니다 (로버 팁, 멈춤, 벼랑을 몰아 내고, 큰 바위에 부딪치게 함) 실제 로버가 도징하는 동안 운전 순서를 완벽하게 할 수 있습니다 안전하고 평화롭게. 5 년 동안 로버 운전자는 로버가 안전하고 성공적으로 로버를 통해 분화구 안팎으로 운전하고, 도전적인 언덕을 오르며, 생각했던 사람보다 더 많은 주행 거리를 갖도록 도와주었습니다. . 가장 큰 운전 재난은 모래 언덕에 갇혀 있었지만 이제는 운전 팀이 그것을 피하기 위해 소매를 약간 비 틀었습니다 (1 부 참조).
따라서 운전자가 시뮬레이션 내부의 명령을 완성하고 로버의 정확한 동작 순서를 연마하면 해당 명령을 업로드하여 실제 로버로 보냅니다. 그런 다음 태양이 화성에 올라 가면서 로버가 깨어나고 지구로부터 통신 업 링크를 수신하고 명령을 처리하며 로버 운전자가 잠들 때까지 작동합니다. Scott은“로버의 마지막 날에 더 많은 사진과 데이터를 보내며주기를 다시 시작합니다.

로버가 넘어지지 않고 얼마나 많은 경사를 견딜 수 있는지와 같이 특히 어려운 상황이 발생하면 테스트 로버는 JPL의 Mars Yard에서 시뮬레이션 된 화성 환경에서 동일한 시퀀스를 통과 할 수 있습니다.
2004 년“프라임 미션”기간 동안, MER과 함께 일한 모든 사람들은 처음 3 개월 동안 (로버가 지속될 예정인 시간) 화성 시간에 살았습니다. 두 로버가 지구 반대편에 있기 때문에 하루 24 시간 운영됩니다. 그리고 화성의 날이 지구의 날보다 40 분 더 길기 때문에, 그것은 끊임없이 변화하는 수면 / 깨우기주기를 의미했습니다. 이는 몸이 지속적으로 "제트 지연"을 느끼는 어려운 상황입니다. 그러나 이제 그 임무가 오랫동안 진행되어 왔기 때문에 플래너는 더 지구 정상 모드로 작동하며 심지어 주말을 쉬기도합니다. 그러나 여전히 계획 자의 8 시간 근무는 오전 6 시부 터 정오까지 어디서나 시작할 수 있습니다.
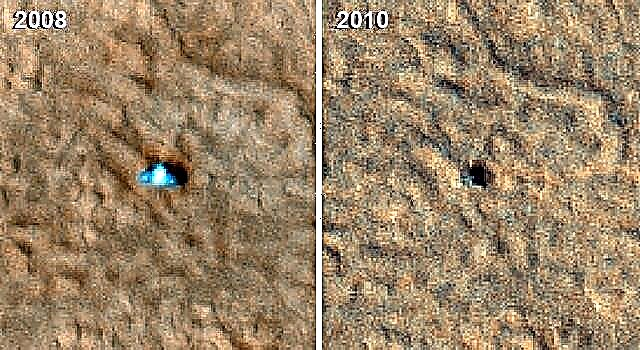
그래서 로버의 평균 운전은 무엇입니까? Scott은“매우 다양합니다. 그러나 평균 운전 거리는 몇 미터 부근에 있습니다.” 지금 스피릿은 로버에게는 가파른 언덕 인“고 원판”의 고지대를 향해 고군분투하고 있습니다. 부서지기 쉬운 토양은 그녀가 등산을 할 때 바퀴 아래에 나눠서 하루에 몇 센티미터보다 아버지를 운전하는 것을 어렵게 만듭니다. 또한 Spirit은 먼지로 덮인 태양 전지판의 저전력을 처리하여 모든 대형 드라이브에 제한된 에너지를 제공합니다. 최근 먼지 폭풍 직후 스피릿의 태양 전지판은 89 와트 시간 만 생산했는데, 이는 1 시간 반 동안 작은 전구를 작동시키는 데 필요한 에너지에 관한 것입니다.

그러나 기회의 파워 레벨이 훨씬 좋아졌으며 최근에 약 12km 떨어진 엔데버 분화구에 도달하기 위해 페달을 금속에 대고 216 미터 길이의 드라이브를 사용했습니다.
일부 로버 드라이버는 주로 하나의 로버와 함께 작동합니다 (Steve Squyres는 작업중인 로버에 따라 하나의 로버에 연결하기가 쉽다고 말했지만 Scott은 두 로버를주고받습니다). "저는 팀 리더이기 때문입니다. 그리고 항상 뛰어 다니고 항상 모든 일에 참여하고 싶은 사람이기 때문입니다!" 그는 말했다. 우리가 지난 주 스캇과 이야기했을 때, 그는 스피릿과 함께 일하고 있었고 이번 주에는 아마도 기회로 운전을 할 것이라고 생각했습니다.
현재 스피릿의 총 주행 거리는 약 7,530 미터 (4.6 마일 이상)이며 기회의 주행 거리계는 거의 14,000 미터 (약 9 마일)입니다.
JPL에는 로버의 트레킹, 트래버스 및 진행 상황에 대한 멋진 비디오가 있으며 MER 웹 사이트에서 정기적으로 업데이트되는 것을 확인하여 로버의 진행 상황을 추적 할 수 있습니다.
내일 : 지난 5 년간 무엇을 했습니까? Scott Maxwell은 화성 탐사선을 운전 한 5 년의 경험을 공유합니다.
화성 로버를 운전하는 방법, 1 부
화성 탐사차를 운전하는 방법, 3 부