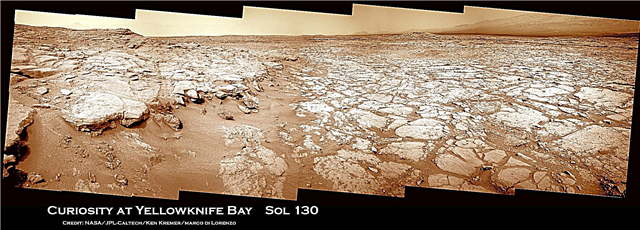
이미지 캡션 : 호기심은 Sol 130. 17에서``Yellowknife Bay ''를 스캔합니다.이 카메라는 내비게이션 카메라 (Navcam) 이미지에서 함께 연결되었습니다. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
오늘 (12 월 25 일) 호기심은 화성에서 첫 번째 크리스마스를‘옐로 나이프 베이’로 축하합니다. 2012 년 8 월 6 일 게일 분화구 내에서 맥박이 뛴 후 Sol 138이며 거의 5 개월이 지났습니다. 로봇은 건강 상태가 우수합니다.
한편 그녀의 언니 기회는 곧 지구 반대편에서 2013 년 1 월 24 일 몇 주 안에 화성에서 헤아릴 수없는 9 년을 축하 할 것입니다.
NASA의 호기심 탐사선은 'Glenelg'라는 지질 학적 지형 내부의 완만 한 경사에서 약 2 피트 (0.5m) 아래로 내려간 후 Sol 130 (2012 년 12 월 17 일)에서 'Yellowknife Bay'라는 얕은 우울증에 도달했습니다. 상황보기를 위해 위와 아래에서 옐로 나이프 베이의 파노라마 모자이크를보십시오.
과학 팀은 고성능 해머 드릴의 취임식 사용을위한 흥미로운 암석을 찾고 있습니다.
SpaceRef의 새로운 보고서에 따르면, 마찰 가열로 인해 암석이 끈적 끈적한 "화성 꿀 (Martian Honey)"로 석화되어 잠재적으로 시료 취급 체 및 메커니즘을 막을 수 있고 심각한 손상을 줄 수 있다는 우려로 인해 시추가 지연되었습니다. 따라서 팀은 로봇 암의 끝에서 터릿에 위치한 타악기 드릴의 초기 사용을 확정하기 전에 암석 목표 유형과 드릴링 작업 절차를 신중하게 재평가하고 있습니다.
이 팀은 이전에 호기심이 주도했던 것과 다른 유형의 지질 지형을 특징으로하기 때문에 '옐로 나이프 베이'로 운전하기로 결정했습니다. 'Glenelg'지역은 3 가지 다른 유형의 지질 지형의 교차점에 있으며 호기심의 첫 번째 확장 된 과학 목적지입니다.
호기심은 Sol 124의 옐로 나이프만의 입술에 도착하여 Sol 125 (12 월 12 일)의 유역으로 들어갔고 스카우트 전경을 들여다 보는 지역으로 들어갔다. 또한 로버는 APXS X-ray 미네랄 분광계, ChemCam 레이저 및 MAHLI 핸드 렌즈 이미 저를 사용하여 초기 과학 특성 데이터를 수집합니다.

2012 년 12 월 12 일 Sol 125의 옐로 나이프 베이 주변에서 호기심이 절정에 달했습니다. 로버는 1 차 착암기 목표를 찾기 위해 분지 안에서 계속 운전했습니다. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
지금까지 로버는 총 주행 거리가 약 0.43 마일 (700 미터)을 지나갔습니다.
대부분의 과학 및 엔지니어링 팀은 크리스마스 휴가 시즌 동안 로봇 허밍을 유지하기 위해 11 개의 Sols 가치가있는 활동을 미리 업로드 한 후 가족과 함께 시간을 보내는 데 필요한 휴식을 취하고 있습니다. JPL의 골격 승무원은 우발 상황을 처리하기 위해 감시하고 있습니다.
최우선 과제 중 하나는 고해상도 360도 마스트 캠 컬러 파노라마를 얻는 것입니다. 이것은 최초의 암석 목표물을 선택하여 내부에서 샘플을 채집하고 수집하는 데 매우 중요합니다.
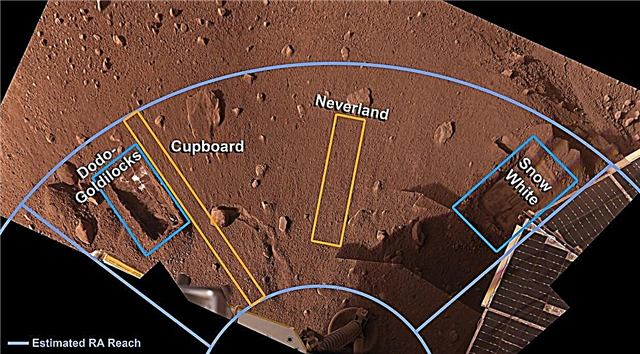
로버 과학 팀의 켄 헤르 켄 호프 (Ken Herkenhoff)는“휴일 전 휴전 전에 옐로 나이프 만 주변의 노두를 잘 볼 수있는 곳으로 운전하기로 결정했습니다. "휴식 중 이미지가 반환되면 이미지를 사용하여 첫 번째 드릴링 작업을 수행 할 위치를 결정할 수 있습니다."
이 팀은 신중한 선택 과정을 거쳐 2013 년 1 월에 드릴 목표를 선택할 것으로 예상합니다.
7 피트 (2m) 길이의 로봇 팔은 Chemin & SAM이라는 고성능 화학 실험실의 고성능 듀오에 의해 분석을 위해 초기 분쇄 된 암석 샘플을 로버 데크의 입구 포트로 전달합니다.

Image Caption : Curiosity는 Sol 129에 로봇 팔을 배치하고 APXS 및 MAHLI 과학 도구를 사용하여 암석을 검사하여 암석 및 토양 조성을 특성화합니다. 이 합성 모자이크는 Sol 129 (12 월 16 일) 및 이전 솔의 Navcam 이미지로 봉합되었으며 로버 데크에서 Chemin 샘플 입구 포트의 위치를 보여줍니다. 크레딧 : NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
호기심은 글 레넬 그를 조사하는 데 적어도 한 달 이상을 보내면서 거의 1 년 동안 그녀의 주요 목적지 인 샤프 산이라는 3 마일 (5km) 높은 산의 하류에있는 퇴적층으로 출발합니다.

이미지 캡션 : Sol 136의 옐로 나이프 베이에서 샤프 산 스캔. Mastcam 100 카메라 이미지로 조립 된이 사진 모자이크는 현재 위치에서 Sol 136 (12 월 23 일)에 대한 호기심으로 찍혔습니다. 주요 목적지 인 샤프 산 (Mount Sharp)이라는 층상 마운드의 일부를 보여줍니다. 옐로 나이프 베이에서 360 고해상도 컬러 파노라마를 얻는 것은 크리스마스 연휴 기간 동안 로버에게 최우선 과제입니다. 크레딧 : NASA / JPL-Caltech / Marco Di Lorenzo / Ken Kremer
화성 까마귀가 날아 가면서 샤프 산의 숨막히는 환경은 약 10km 떨어져 있습니다.
임무 목표는 서식지를 검색하고 2 년의 1 차 임무 단계에서 화성이 과거 또는 현재 미생물 생활을 지원할 수 있었는지 여부를 결정하는 것입니다.

Image Caption : Curiosity Traverse Map, Sol 130.이지도는“Bradbury Landing”이라는 사이트에 착륙하는 사이에 호기심이 발생한 지점과 Sol 130 (2012 년 12 월 17 일) 동안“Yellowknife Bay”라는 지점에 도달 한 위치를 추적합니다. "Glenelg"라는 영역 안에 있습니다. 삽입 된 부분은 트래버스의 최신 레그를보다 자세하게 보여줍니다. 크레딧 : NASA / JPL-Caltech / Univ. 애리조나