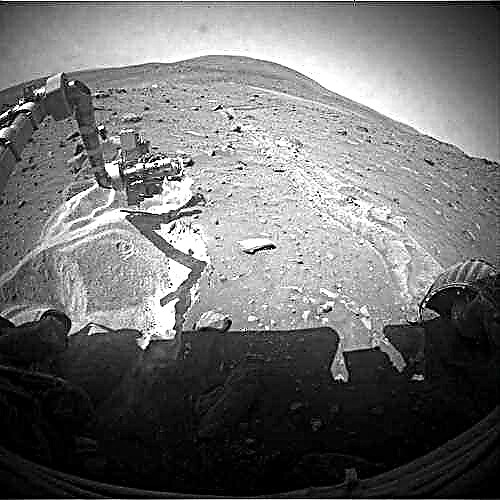
로버 업데이트는 다음과 같습니다. 스피릿은 홈 플레이트의 서쪽에있는 그녀의 위치에 머물러 있으며 JPL에서 로버를 부드러운 토양에 묻은 방법을 테스트하는 작업을 계속하고 있습니다. 바위가 스피릿 아래에있어 움직이지 못하게 할 수 있지만, 로봇 팔 끝에있는 현미경 카메라로 더 많은 이미지가 촬영되어 로버 아래와 주위에서 무슨 일이 일어나고 있는지 정확하게 판단하려고합니다. 그러나 강화 된 전원 공급 장치로 Spirit은 주변 환경을 과학적으로 관찰하는 데 바빴습니다. 로버 운전사 인 스콧 맥스웰 (Scott Maxwell)은 트위터에서 트위터를 통해 최근 바람 사건으로 인해 태양의 힘을 많이 빼앗아 밤새 관측을 시도 할 수있는 힘이 있다고 트위터에 암시했습니다. 화성의 밤하늘에 대한 PANCAM 이미지를 기대하십시오!
다른 로버 드라이버 인 Ashley Stroupe의 Mars Exploration 로버에서이 비디오 업데이트를 즐기십시오.
Sol 1932 (2009 년 6 월 9 일) 기준으로 Spirit의 태양열 에너지 생산량은 828 와트시입니다. 총 주행 거리계는 7,729.93 미터 (4.80 마일)입니다.
한편 지구 반대편에서 기회는 계속 남쪽으로 향하여 엔데버 분화구로 향합니다. Sol 1906 (2009 년 6 월 4 일)에서 로버는 남쪽으로 69 미터 (266 피트)의 주행을 완료했습니다. 오른쪽 앞바퀴가있는 높은 액추에이터 전류가 계속 우려됩니다. Sol 1910 (2009 년 6 월 8 일)에서 다중 휠 전류 제한 임계 값을 초과하여 계획된 드라이브가 조기에 중지되었습니다. 다음 솔에 대한 진단 조작이 성공적으로 이루어졌으며 이전 솔에 대한 원인은 오른쪽 앞바퀴 모터 전류가 높아졌기 때문입니다.

Sol 1912 (2009 년 6 월 10 일)에서 긴 역방향 드라이브가 수행되었습니다. 후진 운전은 높은 휠 전류를 완화시키는 기술 중 하나입니다. 그러나 72 미터 (236 피트) 주행 후에도 휠 전류가 계속 상승했습니다. 로버 액츄에이터의 추가 휴식이 고려되고 있습니다.
향후 계획에는 소형 열 방출 분광계 (Mini-TES)의 덮개를 열어 장비의 먼지로 오염 된 고도 거울을 환경에 노출시키는 것이 포함됩니다. 이것은 바람 환경이 거울의 먼지를 청소하도록하기위한 것입니다.
Sol 1912 (2009 년 6 월 10 일) 기준으로 기회의 태양 광 어레이 에너지 생산량은 431 와트시입니다. 기회의 총 주행 거리는 16,569.05 미터 (10.3 마일)입니다.