Mars Reconnaissance Orbiter의 고해상도 HiRISE 이미지를 보았거나 새로운 Google Mars를 탐험 할 기회가 있다면 Mars는 분화구, 산, 협곡 및 모든 종류의 흥미롭고 위험한 지형으로 가득 차 있습니다. . 퇴적물, 퇴적물, 파쇄 및 결함이있는 영역은 화성에서 생성되는 메탄의 원천을 찾는 장소의 유형일뿐입니다. 그러나 2011 Mars Science Laboratory (MSL)를 포함한 현재 스타일의 로버를 위험한 지형으로 보내는 것은 너무 위험합니다. 그러나 JPL의 엔지니어와 California Institute of Technology의 학생들은 절벽을 감싸고 가파르고 바위가 많은 지형을 따라 빠르게 여행하고 탐험 할 수있는 MSL과 같은 더 큰 로버에 추가 할 수있는 다목적 저 질량 로봇을 설계하고 테스트했습니다. 깊은 분화구.
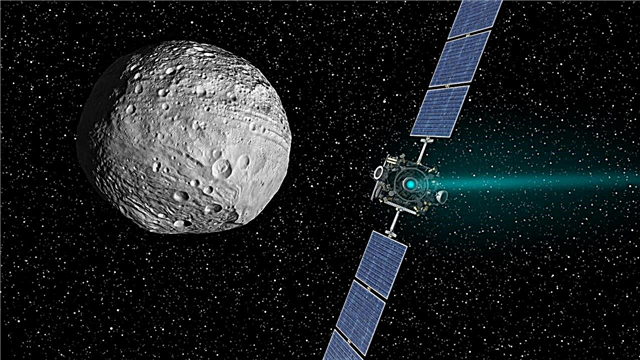
Axel이라고하는이 프로토 타입 로버는 미래의 로봇 우주선이 화성과 같은 외국 세계를 더 잘 탐색하고 조사하는 데 도움이 될 수 있습니다. 지구상에서 Axel은 수색 및 구조 작업을 지원할 수 있습니다.
JPL의 로봇 공학 및 이동성 부문의 Issa A.D. Nesnas 수석 연구원은“Axel은 수직 경사 경사면이있는 깊은 분화구와 같이 과거에는 탐험 할 수 없었던 지형을 탐색 할 수있는 능력을 확장합니다. “또한 Axel은 상대적으로 질량이 적기 때문에 임무는 여러 Axel 로버를 운반 할 수 있습니다. 이는 전체 위험을 관리 할 수있는 상태로 유지하면서 탐색하려는 지형에보다 적극적인 기회를 제공 할 것입니다.”
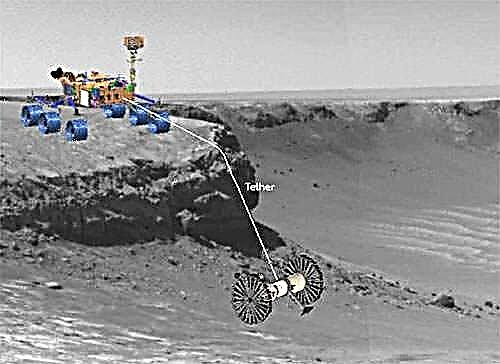
Nesnas는 Axel은 요요와 같다고 말합니다. 더 큰 로버에 연결된 밧줄로 크레이터, 협곡 및 협곡의 측면을 오르 내릴 수 있으며 다른 로버에게는 안전하지 않은 지역을 탐험 할 수 있습니다.

거꾸로 및 오른쪽으로 모두 작동 할 수있는 간단하고 우아한 Axel 디자인은 세 개의 모터 만 사용합니다. 하나는 두 바퀴를 각각 제어하고 다른 하나는 레버를 제어합니다. 레버에는 과학자들이 연구 할 수 있도록 음력 또는 행성 재료를 모으는 특종이 포함되어 있으며 로봇의 두 스테레오 카메라를 조정하여 360도 기울일 수 있습니다.

Axel의 원통형 본체에는 컴퓨팅 및 무선 통신 기능과 관성 센서가있어 자율적으로 작동합니다. 또한 Axel이 더 큰 착륙선, 로버 또는 앵커 포인트에서 내려갈 수있는 밧줄을 자랑합니다. 로버는 대형 접이식 바퀴부터 풍선 바퀴까지 다양한 휠 유형을 사용할 수있어 로버가 단단한 착륙을 견뎌내고 바위가 많은 지형을 처리 할 수 있습니다.
Axel은 1999 년부터 개발되어 왔으며 Caltech, Purdue University 및 Arkansas Tech University의 학생들은이 다목적 로버를 개발하기 위해 수년간 JPL과 협력 해 왔습니다.
Axel에 대한 자세한 내용은 JPL의 Axel 페이지 및 Caltech의 Axel 웹 사이트를 참조하십시오.