NASA의 제트 추진 연구소 (Jet Propulsion Laboratory)는 최근에 미래의 화성 탐사선의 길을 정찰하기 위해 소형 드론 헬리콥터를 개발 중이라고 발표했습니다. 화성 탐사선이 왜 그러한 로봇 가이드가 필요한가? 답은 화성을 운전하는 것이 정말 어렵다는 것입니다.
지구상에서, 화산 림을 탐험하거나 구조대를 돕는 로봇은 조이스틱으로 리모컨으로 구동 할 수 있습니다. 무선 신호가 제어 센터에서 거의 즉시 로봇에 도달하기 때문입니다. 달을 운전하는 것은 그리 어렵지 않습니다. 빛의 속도로 이동하는 무선 신호는 약 2 초 반이 걸리므로 달과 왕복으로 왕복합니다. 이 지연 시간은 리모컨 구동을 심각하게 방해 할만큼 길지 않습니다. 1970 년대 소비에트 컨트롤러는 Lunokhod 달 탐사선을 이런 식으로 운전하여 40km가 넘는 달의 지형을 성공적으로 탐험했습니다.
훨씬 더 멀기 때문에 화성을 운전하는 것은 훨씬 어렵습니다. 지구와의 위치에 따라 왕복에 신호가 8 분에서 42 분 정도 걸릴 수 있습니다. 사전 프로그래밍 된 명령어는 로버로 전송되어야하며, 로버는 자체적으로 실행됩니다. 각 화성인 드라이브는 몇 시간의 신중한 계획이 필요합니다. 로버의 내비게이션 카메라로 촬영 한 스테레오 이미지는 엔지니어가 신중하게 조사합니다. 우주선 궤도 화성의 이미지는 때때로 추가 정보를 제공합니다.
로버는 어스에서 전송 된 주행 명령 목록을 간단히 실행하도록 프로그래밍하거나 내비게이션 카메라로 촬영하고 온보드 컴퓨터에서 처리 한 이미지를 사용하여 속도를 측정하고 자체적으로 장애물이나 위험을 감지 할 수 있습니다. 심지어 특정 목표에 대한 안전한 경로를 구성 할 수도 있습니다. 지상에서의 지시에 따른 드라이브가 가장 빠릅니다.
화성 탐사 로버 정신과 기회는 이런 식으로 한 시간에 최대 124 미터까지 운전할 수 있습니다. 이것은 미식 축구장의 길이에 해당합니다. 그러나이 모드는 가장 안전하지 않았습니다.
로버가 카메라로 능동적으로 가이드 할 때, 모든 이미지 처리로 인해 진행이 더 안전하지만 훨씬 느려집니다. 그것은 시간당 10 미터 정도 진행될 수 있는데, 이것은 미식 축구장의 골 라인에서 10 야드 라인까지의 거리입니다. 이 방법은 로버가 전방 경로를 명확하게 볼 수 없을 때마다 사용되어야합니다. 이는 종종 거칠고 언덕이 많은 지형 때문입니다.
2015 년 초 현재, 하루 중 가장 먼 호기심은 144 미터입니다. 기회의 가장 긴 일일 운전은 2 개의 미식 축구장 길이 인 224 미터였습니다.
지상 제어기가 전방 경로를 더 잘 볼 수 있다면 미래 로버가 하루 안에 훨씬 더 안전하게 운전할 수 있도록 지시 사항을 고안 할 수 있습니다.
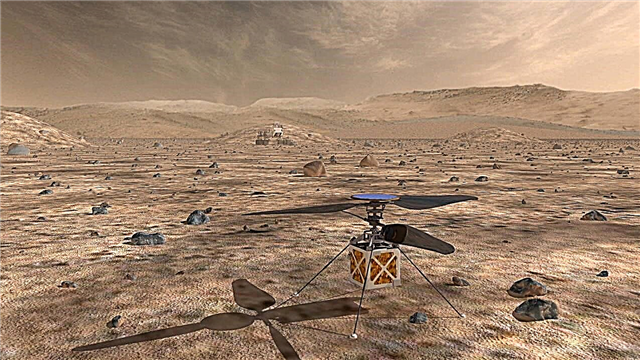
그곳에서 무인 항공기 헬리콥터 아이디어가 나옵니다. 헬리콥터는 매일 로버를 뛰어 넘을 수 있습니다. 공중 유리한 지점에서 만들어진 이미지는 과학적인 관심 지점을 식별하고 거기에 도달하기위한 주행 경로를 계획하는 데있어 지상 컨트롤러에게 매우 중요합니다.
화성에 헬리콥터를 비행하는 것은 특별한 도전을 제기합니다. 한 가지 장점은 화성의 중력이 지구보다 38 % 나 강하기 때문에 헬리콥터가 지구에서 동일한 질량 중 하나만큼 많은 양력을 생성 할 필요가 없다는 것입니다. 헬리콥터의 프로펠러 블레이드는 공기를 아래로 밀어 들어 올립니다. 화성 대기가 수백 배 더 얇기 때문에 지구보다 화성에서 수행하기가 더 어렵습니다. 충분한 공기를 대체하려면 프로펠러 블레이드가 매우 빠르게 회전하거나 커야합니다.
헬리콥터는 사전 지정된 경로를 따라 안정적인 비행을 유지하면서 사전 지시를 사용하여 자체적으로 비행 할 수 있어야합니다. 바위가 많은 화성 지형에서 반복적으로 착륙해야합니다. 결국 화성의 온도가 화씨 100도 이하로 떨어지는 화성 조건에서 살아남을 수 있어야합니다.
JPL 엔지니어들은 질량이 1 킬로그램 인 헬리콥터를 설계했습니다. 호기심 로버 900kg 질량의 작은 부분. 프로펠러 블레이드는 블레이드 팁에서 블레이드 팁까지 1.1 미터에 걸쳐 있으며 분당 3400 회 회전 할 수 있습니다. 몸은 조직 상자의 크기와 비슷합니다.
헬리콥터는 매일 2 ~ 3 분의 비행에 전력을 공급하고 밤에는 차량을 가열하기에 충분한 전력을 수집하는 태양 전지 디스크를 갖춘 태양열 동력입니다. 그 시간에 약 0.5 킬로미터를 날아갈 수 있으며 지상 제어기로 전송할 이미지를 수집 할 수 있습니다. 엔지니어들은 드론 헬리콥터가 수집 한 정찰이 로버의 주행 계획을 세우는 데 귀중한 시간이 될 것으로 예상합니다.
참고 문헌 및 추가 자료 :
호기심과 기회의 일일 주행 거리에 대한 정보를 얻으려면 NASA Jet Propulsion Laboratory의 Mark Maimone에게 감사드립니다.
제이 Biesiadecki, P.C. Leger 및 M.W. Maimone (2007),‘화성 탐사 로버에서의 직접 운전과 자율 주행 사이의 거래 '', 국제 로봇 공학 연구, 26 (1), 91-104
E. Howell, 기회 화성 로버는 2014 년 12 월 Space Magazine '마라톤 밸리 (Marathon Valley)'를 향해 41km를지나갑니다.
T. Reyes, 놀라운 여행, 화성 호기심 로버는 샤프 산 기슭에 도달합니다. Space Magazine, 2014 년 9 월.
헬리콥터는 화성 탐사선의 스카우트 일 수 있습니다. NASA 제트 추진 연구소 보도 자료. 2015 년 1 월 22 일.
미친 공학 : 화성 헬리콥터. NASA 제트 추진 연구소 비디오.
호기심-화성 과학 실험실, NASA.
화성 미래 로버 계획. NASA