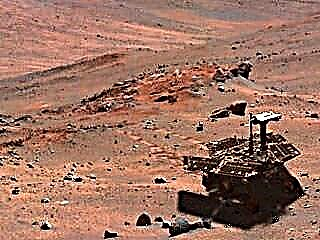
Solander Point의 산기슭 근처에서 기회 로버의 시야는 Endeavour 분화구의 테두리와 광대 한 창을 따라 찾고 있습니다. Solander Point는 과거 화성 거주 환경을 나타내는 점토 광물을 보유 할 수 있습니다. 이 navcam 모자이크는 Sol 3374 (2013 년 7 월 21 일)에서 촬영 한 원시 이미지로 조립되었습니다. 크레딧 : NASA / JPL / Cornell / Marco Di Lorenzo / Ken Kremer (kenkremer.com).
아래의 완전한 파노라마 모자이크를 참조하십시오. 자세한 내용으로 업데이트 된 스토리[/표제]
NASA의 대담한 기회 로버는 붉은 행성을 향해 폭발하고 수많은 크레이터를 크롤링하여 크래프트를하면서 수많은 물이 바뀐 암석과 광물을 발견 한 지 정확히 10 년이 지나서 다음 큰 퀘스트에 도착하는 데 며칠이 걸리지 않았습니다. 화성 생명체를 유지하는 데 필요한 주요 화학 성분을 함유 할 수있는 Solander Point라는 화성 산.
Ray Arvidson은 Space 잡지에 독점적으로 말했다.“우리는 Solander Point 벤치에서 200m 떨어져 있습니다. Arvidson은 미주리 주 세인트루이스에있는 Washington University의 미션 과학 수사관입니다.
Solander Point는 또한 '완전히 다른 것'을 나타내며, 대담한 로봇이 처음으로 올라가는 산입니다.
뉴 멕시코 자연사 과학 박물관의 과학 팀 멤버 인 래리 크럼 글러 (Larry Crumpler)는 10 년 동안 진행된 화성 탐사에 관한 최근의 현장 보고서에서“이 기회는 기회의 첫 산이 될 것이며 산마루에서 보이는 경치는 장관이되어야한다. 로버 (MER) 미션.
실제로 로버는 현재 엔데버 분화구 가장자리 주변의 평평한 평원을 가로 지르는 현재 트레킹 지점의 북쪽 끝 부분에 착륙하는 데 불과 몇 분의 짧은 드라이브입니다.
"우리는 이제 새로운 산인 Solander Point에서 불과 180m 떨어져 있습니다."

그러나 Arvidson은 앞으로 나아 가기 전에 NASA의 Mars Reconnaissance Orbiter (MRO)가 오버 헤드를 돌면서 포착 한 CRISM 기기의 물 관련 스펙트럼 관찰로 인해 흥미로운 과학을 위해 로버가 여기에서 "어두운 지형에서"잠시 멈추게 될 것이라고 설명했습니다.
Arvidson은“Mars orbit의 CRISM 데이터는 H2O 함유 광물로 인해 1.9 마이크로 미터의 흡수 특성을 보여줍니다.
지난 봄, 기회는 Endeavour 분화구 가장자리에있는 로버의 사전 정거장에서 Cape York라는 낮은 언덕에서 점토 광물과 거주 환경을 역사적으로 발견했습니다.
Solander는 로봇의 다음 목적지로 선정되었습니다. 기회의 태양 날개가 태양 광선을 더 효과적으로 흡수하여 다음 화성 겨울 동안 전력을 공급하는 생명체를 생성 할 수있는 북쪽의 경사면뿐만 아니라 과학의 금광을 동시에 제공하기 때문입니다.
그러나 기회는 현재 그녀의 태양 배열에서 많은 전력을 생산하고 6 번째 화성의 겨울이 다가 오기 전에 보너스 쿠션으로 도착하기 때문에 팀은 남동쪽으로 작은 우회를 결정하고 몇 가지 솔 (또는 화성 일)을 소비하기로 결정했습니다. ) 산기슭을 둘러싼 벤치에서 노두, 석고 시그니처 등 흥미로운 지질 학적 영역을 탐색합니다.
Crumpler는“이번 주 궤도를 늦추어 궤도 원격 감지에서 이상한 수화 신호가있는 곳의 바위를 확인할 수있었습니다.
“이것은 또한 화성 궤도의 HiRISE 이미지에 더 큰 블록이있는 것으로 보이는 영역이므로“Black Shoulder”블록 중 하나를 확인하고 있습니다.
Crumpler는“우리는 산마루에있는 바위도 장관을 이루기를 바라고 있습니다.

기회는 3 피트 (1 미터) 길이의 로봇 팔에있는 과학 기기를 사용하여 MI (Microscopic Imager) 및 APXS (Alpha Particle X-ray Spectrometer)를 사용하여 "Black Shoulder"에 대한 간단한 현장 조사를 수행합니다.
그리고…. 화성에 대한 기회의 장엄한 미션의 나머지 부분을 위해 여기에서‘산 산맥’입니다.
왜? 기회는 Endeavor 분화구의 분화구 벽의 긴 침식 된 세그먼트의 산기슭 근처에 있기 때문에 폭이 14 마일 (22 킬로미터)에 이릅니다.
Solander Point는 과거의 화성 거주 지역을 나타내는 두꺼운 암석 더미 층에 중성 pH의 물에서 형성되는 필로 실리케이트 점토 광물을 보유 할 수 있습니다.
로버 팀은 Solander에 접근하고 운전하는 가장 좋은 방법을 논의 중입니다.
Ray Arvidson은 Space Magazine에 설명했다.“한 가지 아이디어는 림의 서쪽에서 Solander를 어느 정도 운전하고 왼쪽으로 돌린 다음 층계가있는 가파른 북쪽 경사면을 주행하는 것입니다.
"그러면 비교적 가파른 경사면을 주행 할 필요가 없습니다."
"로버는 약 12 ~ 15도 기울어 진 바위 표면을 운전할 수 있습니다."
Arvidson은“북쪽 섹션의 계층 섹션을 살펴보고 싶습니다.

오늘 (7 월 28 일)은 지난 90 Sols에 대해서만 보증 된 임무의 Sol 3380입니다!
기회의 총 주행 거리는 23.6 마일 (37.9km)을 초과합니다. 그녀는 182,000 개가 넘는 이미지를 찍었습니다.

한편 게일 분화구 (Gale Crater)의 화성 반대편에서 기회의 여동생 로버 큐리오 시티 (Couriosity)는 붉은 행성이 훨씬 더 따뜻하고 수십억 년 전에 습윤했던 시대로부터 시작된 거주 환경을 발견했습니다.
그리고 기회와 마찬가지로, 호기심도 과거의 화성의 신비를 밝히기를 희망하는 퇴적층이 풍부한 산으로 트레킹하고 있습니다. 그러나 호기심은 1 년 동안 5.5km 높이의 샤프 산에 도착하지 않을 것으로 보입니다.

…………….
Ken의 다가오는 강의 프리젠 테이션에서 화성, 호기심, 기회, LADEE, MAVEN, 안타레스 등에 대해 자세히 알아보십시오.
8 월 12 일 :“RockSat-X Suborbital Launch, LADEE Lunar & Antares Rocket은 버지니아에서 출시되었습니다. 로드 웨이 인, 친코 테그, VA, 오후 8시