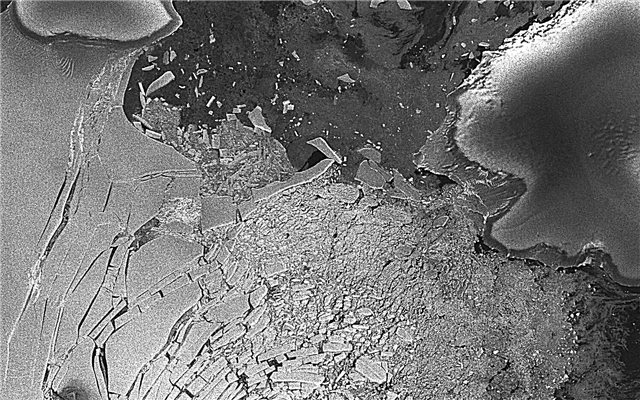
하야부사는 착륙하기 전에 이토 카와로 내려갑니다. 이미지 크레디트 : JAXA 확대하려면 클릭
하야부사는 2005 년 11 월 20-21 일에 터치 다운 및 샘플 수집을 목적으로 이토 카와에 첫 소프트 랜딩을 시도했습니다. 다음은 상태에 대한 사전 보고서와 함께 데이터 정보입니다.
하야부사는 2005 년 11 월 19 일 오후 9시에 고도 1km에서 하강하기 시작했습니다. 접근 과정 중 안내 및 항법은 정상적으로 운영되었으며 11 월 20 일 오전 4시 33 분에 수직 하강의 마지막 접근은 지상에서 명령되었으며,이 중 착륙 지점은 거의 착륙 지점에서 거의 착륙했습니다. 표면. 목표 지점에서의 편차는 현재 조사 중이지만 30cm의 여유 범위 내에서 추정됩니다.
하강 시작시의 속도는 12cm / sec였다. 5시 28 분 고도 54m에서, 표적 마커의 와이어 커팅이 지시되었고, 그 후, 고도 40m에서 5시 30 분에 우주선은 목표 마커를 실질적으로 분리하기 위해 자체 속도를 9cm / sec 감소시켰다. 하야부사의 속도가 3cm / sec가되었음을 의미합니다. 마커의 분리 및 자유 낙하는 속도 감소시 우주선의 하강 속도뿐만 아니라 이미지로부터 확인되었다. 마커는 MUSES Sea의 남서쪽에 착륙 한 것으로 추정됩니다.
하야부사는 고도 측정 35m에서 레이저 고도계 (LIDAR)에서 레이저 거리 측정기 (LRF)로 범위 측정을 전환하고 하야부사 (Hayabuusa) 아래에서 높이 17m에서 5:40 am 아래로 하강 속도를 0으로 줄임으로써 호버링으로 이동했습니다. , 소행성 표면의 모양에 조정 가능한 자세 제어 모드로 기능하는 자유 낙하를 시키십시오. 이 시점에서 우주선은 자율적으로 지구로의 원격 측정 전송을 멈췄다 (예약 된대로) LGA (Low Gain Antenna) 커버 가능 넓은 영역으로 전환하여 도플러 측정에 더 효율적인 비콘 모드로 전송으로 변경되었습니다.
그 이후로 온보드 계측기는 실시간으로 (스케줄 된대로) 불가능했지만, 온보드로 기록 된 데이터를 분석 한 결과 지난 2 일 동안 지구로 다시 전송 된 결과 하야부사는 자율적으로 장애물 점검 용 팬 빔 센서가 일종의 캐치 라이트를 감지하여 하강 중단 및 비상 상승 시도. 하야부사에게는 자세 제어를 위해 허용 마진이 설정됩니다. 우주선이 자체적으로 속도를 가속화하여 지상에서 이륙하는 경우입니다. 그러한 상황에서 당시 우주선의 태도는 한계를 벗어 났으며, 그로 인해 안전한 하강이 계속 선택되었습니다. 결과적으로 하야부사는 터치 다운 센서 기능을 활성화하지 않았습니다.
11 월 21 일 시점에 하야부사는 표면에 착륙하지 않은 것으로 판단되었다. 그러나 재생 된 데이터에 따르면, 하야부사는 침강 전에 두 번 부드럽게 튕긴 후 약 30 분 동안 표면과 접촉하여 이토 카와에 머물렀다는 것이 확인되었다. 이것은 LRF의 데이터 이력과 자세 제어 기록으로 확인할 수 있습니다.
이 현상은 NASA의 DSN (Deep Space Network)에서 Usuda Deep Space Center로 전환하는 동안 발생했습니다. 이로 인해 지상 도플러 측정으로 사고가 감지되지 않았습니다. 수신 거부시 두 번 내림 속도는 10cm / sec입니다. 각기. 기기의 일부를 점검해야하는 가열 센서를 제외하고는 우주선에 대한 심각한 손상은 아직 발견되지 않았습니다.
하야부사는 오전 6시 58 분 (JST)에 비상 이륙을 알리기 위해 지상에서 신호를받을 때까지 표면과 지속적으로 접촉했습니다. 위에서 언급 한 이유로 인해 샘플링을 위해 작동하는 터치 다운 센서가 작동하지 않았습니다. 그 이유 때문에 우주선이 실제로 착륙 했음에도 불구하고 프로젝터의 발사가 구현되지 않았습니다. 착륙 자세는 샘플러 혼 + X 축의 양 하단과 태양 전지판의 우주선 또는 선단이 표면과 접촉 한 것으로 추정됩니다. 하야부사는 소행성에서 이륙 한 세계 최초의 우주선이되었습니다. 실제로, 그것은 달을 제외한 천체에서 세계 최초의 출발입니다.
지상 명령으로 소행성에서 출발 한 후 하야부사는 통신 회선이 불안정하고 온보드 제어 및 컴퓨팅 우선 순위와의 충돌로 인해 안전 모드로 전환했습니다. 안전 모드에서 일반 3 축 제어 모드로의 복귀에는 11 월 21 일과 22 일의 이틀이 필요했습니다. 이로 인해 20 일에 기록 된 데이터의 재생이 아직 중간에 있으므로 더 많은 새로운 정보를 공개 할 수 있습니다 데이터의 추가 분석. 현재로서는 정확한 위치를 파악하기위한 방문 사이트의 상세 이미지가 아직 처리되지 않았습니다. 하야부사는 이제 상륙 및 샘플링 시퀀스를 다시 수행 할 수있는 위치로 비행 중입니다. 11 월 25 일 (JST) 밤부터 하강 작업을 수행 할 수 있을지 여부는 아직 확실하지 않습니다. 11 월 24 일 저녁에 일정을 발표합니다.
하강 및 착륙 작업은 모두 NASA의 DSN 가용성에 따라 달라집니다. 백업 스테이션을 포함하여 네트워크를 추적하는 NASA의 협력에 진심으로 감사드립니다.
원본 출처 : JAXA 뉴스 릴리스