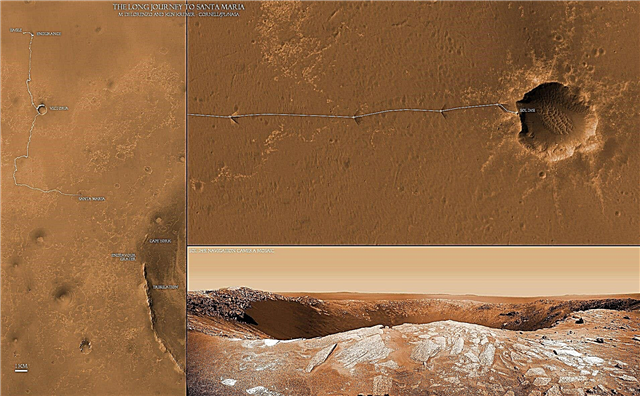
기회 로버는 12 월에 분화구 서쪽 가장자리에 도착한 이래로 산타 마리아 분화구의 멋진 전망을 과도하게 전송하고 있습니다. 빅토리아 분화구에서 거대한 엔데버 분화구까지의 19km 길이의 로버에 대한 중간 정지 여행 가치가 있고 과학 팀 모자에 또 다른 훌륭한 깃털을 제공합니다.
세인트루이스에있는 워싱턴 대학의 레이 아비 슨 (Ray Arvidson)에 따르면 산타 마리아는“상대적이지 않고 신선하다”고한다. Arvidson은 Spirit and Opportunity 로버의 부 책임자입니다. 이젝터에서 나온 바위와 바위가 림을 울립니다. 분화구는 직경이 약 90 미터이고 깊이는 9 미터에서 14 미터 사이입니다. 그것은 완전히 타원형이 아닌 다소 타원형입니다.

12 월 16 일 (Sol 2451) 림에서 약 5 미터 거리로 처음 운전 한 후 기회는 이제 분화구 가파른 절벽의 절벽 부근까지 조심스럽게 기어 올랐습니다. 각 지점에서 로버는 일련의 파노라마 이미지를 찍어 과학적으로나 미적으로 사이트를 문서화하고 다음 솔 드라이브를 계획합니다.
지구에서 수백만 킬로미터 떨어진 곳으로 돌아온 팀은 절벽에서 떨어지지 않도록 기회가 가장자리에 가까워지면서 극도로주의를 기울여야합니다. 카메라는 12 월 16 일에 극적인 간격의 구멍을 드러내는 반면, 기회는 이제 카메라를 가파른 벽 절벽과 직접 분화구 바닥 분화구의 모래 언덕으로 향하게하여 화려하고 화려한 화성의 풍경을 드러냅니다.
기회가 단계적으로 림으로 올라가고 다른 유리한 지점에서 분화구 환경을 탐험하기 시작하면서 Sols 2451 및 2454의 파노라마를 위아래로 비교하십시오.




로버 핸들러는 크레이터 림의 위험 구역 내에서 175kg 차량을 앞뒤로 정확하게 조작하는 데 매우 능숙합니다. NASA의 Jet Propulsion Laboratory (JPL)의 붉은 행성에 대한 7 년 연장 임무를 위해 모든 기회가 분화구 여행을 한 후, 엄청나게 많은 눈부신 지역, 특히 50 미터 절벽에 대한 운전 기술을 연마했습니다. 빅토리아 분화구에서 삭제합니다.
산타 마리아의 서쪽에서 우선 순위가 높은 활동에는 일련의 긴 기준선 고해상도 스테레오 파노라마로 첫 번째 쌍을 수집하는 것이 포함되며, 3D로 디지털 고도지도를 만드는 데 사용될 것입니다. 캘리포니아 패서 디나에있는 NASA의 제트 추진 연구소 (JPL)에서 NASA의 Mars Rover 임무를 관리합니다.
새로 조립 된 분화구지도 (여기에서 첫 번째 모자이크 참조)는 다가오는 다 주간 과학 캠페인 동안 방문하기 가장 좋은 위치를 계획하는 데 사용됩니다. .
JPL 엔지니어는 Sol 2450 접근 점에서 림 주위로 반 시계 방향으로 기회를 이동합니다.
JPL 로버 드라이버 스콧 맥스웰 (Scott Maxwell)은“크리스마스 휴식 전 마지막 드라이브는 우리를 감시 지점으로 20 ~ 20m 정도 데려가 다음 주에 또 다른 드라이브를 준비 할 것”이라고 말했다. “지난 주말에 산타 마리아를 돌아 다니면서이 새롭고 멋진 전망에 도달했습니다. 여기는 웅장합니다.”
"화구에 들어갈 계획이 없습니다." 웹스터가 저에게 확인했습니다. 기회가 물에서 형성되어 화성 표면에서 직접 분석 된 적이없는 엔데버의 필로 실리케이트 점토에 매우 근접 할 때 위험을 감수 할 이유가 없습니다.
기회는 산타 마리아의 남동쪽 지역으로 향하여 화성 정찰 궤도 (MRO)의 광물 맵핑 CRISM 분광계에 의해 화성 궤도에서 수집 한 데이터를 기반으로 황산염 광물을 함유 한 물의 노출을 보여줍니다.
“

현재 계획은 1 월 말에 시작하여 2 월 중순에 끝나는 곧 예정된 Solar 제휴를 통해 기회를 산타 마리아에 유지하도록 요구하고 있습니다.”라고 Webster는 말했습니다.
로버는 해당 기간 동안 정지 상태를 유지하고 로봇 팔의 도구 (록 드릴, 현미경 및 분광계 포함)를 사용하여 특정 지점에 대한 집중적 인 조사를 수행합니다.
“함께 연결하는 동안 명령 전송이 중단 될 수 있다는 경고없이 로버에 명령이 업 링크되지 않습니다. 웹스터는 그 기간 동안 일부 다운 링크가 수신 될 수 있다고 설명했다.
Webster는“우리는 선택된 목표의 구성에 대한 장기 통합 평가를 위해 '새로운 명령 없음'시간을 사용할 것입니다.
JPL의 로버 프로젝트 매니저 인 존 칼라스 (John Callas)는“팀은 산타 마리아를 목표로 기회의 RAT 또는 Rock Abrasion Tool을 사용할 계획이다. RAT는 연삭 휠을 사용하여 화성암을 자르고 기대 이상의 성능을 발휘하는 첨단 장치입니다. 다이아몬드가 내장 된 연마재 톱니에는 여전히 약간의 수명이 남아 있으며, 팀은 엔데버 림 대상에 대한 마모 능력을 절약하려고합니다.
기회는 건강하게 유지되며, 동쪽으로 향한 마지막 행진을 위해 노력할 수있는 풍부한 태양력을 보유하고 있습니다.