우리 중 일부는 지금 당장 모래에 발가락을 찌르는 것을 꿈꾸고 있을지 모르지만, 호기심 로버는 실제로 그렇게하고 있습니다. 그러나 로버는 화성에서 매우 이례적이고 눈에 띄는 모래 언덕을 통과하기 때문에 휴가가 아닙니다. Bagnold Dune Field는 후지산의 북서쪽 측면에 있습니다. 호기심이 임무의 주요 목표 인 날카로움은 지구 이외의 곳에서 활발한 모래 언덕에 대한 근접 연구를 한 최초의 기회입니다.
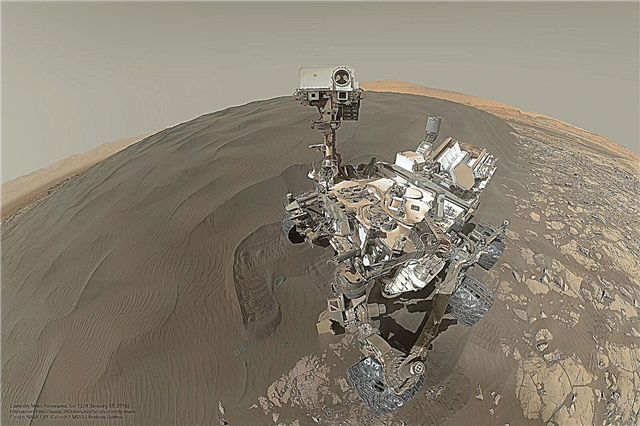
이 57 개의 이미지 모자이크 '셀카'를 공유해 주신 Andrew Bodrov에게 감사의 말씀을 전하며 아래의 대화식 버전을 통해 모래 언덕의 멋진 전망을 감상 할 수 있습니다. 이미지는 Sol 1228 (2016 년 1 월 19 일)에서 로버의 화성 핸드 렌즈 이미 저 (MAHLI)에 의해 촬영되었습니다.
화성 파노라마 – 호기심 로버 : 화성의 태양 1228 일
SAM으로 모래 언덕 샘플링
로버는이 57 개의 이미지 모자이크 '셀카'를 만들기 위해 이러한 이미지를 찍는 것을 멈추었지만 모래 언덕을 탐색하고 샘플링을 중단하는 호기심도 매우 바빴습니다. 흥미롭게도, 로버는 모래의 일부를 퍼 내고이를 온보드 화학 실험실 인 Mars (샘플 분석) (SAM)로 보냈습니다. 스쿠프가 작은 부분 (보통 아기 아스피린의 약 절반 크기)을 전달하는 데 사용 된 것은 이번이 두 번째입니다. 로버의 드릴은 샘플을 얻기 위해 여러 번 사용되었습니다.
호기심은 1 월 14 일에 첫 번째 사구 샘플을 퍼부었지만, 로버는 바퀴에 잠깐 멈췄다. 이 샘플을 수집하는 로버 플래너 인 Michael McHenry는“스커프는 우리가 국자 경로가 모래 밑으로 닿지 않을 정도로 우리가 떠 다닐 수있는 충분한 모래를 가지고 있다는 확신을주었습니다.
나는 약 2 주 전에 JPL에서 호기심을 이끌었던 로버 계획팀 인 John Michael Morookian과 함께 방문 할 기회를 가졌으며, 그 계획은 짧은 거리로 모래 언덕으로 운전하고, 국자와 샘플을 가져 와서 기내 실험.
Morookian은 Mars Reconnaissance Orbiter에있는 HiRISE 카메라의 궤도 이미지에서 로버가 이동하기 위해 모래 언덕 사이에 좋은 경로가 있으며 로버가 끼이거나 갇힐 위험이 없어야한다고 설명했습니다.
"우리는 그들을 우회 할 것입니다, 가능한 경로가 많이 있습니다"라고 그는 말했다. “이것은 지나칠 수없는 지역이 아닙니다. 로버는 대략 1 월 한 달 동안 샘플링을하는이 특정 장소에있을 것이며, 현재 계획은 모래 언덕을 우회하여 약 1km의 모래 언덕을 우회하여 같은 분야의 모래 언덕에있는 덜 활동적인 모래 언덕에 도착하는 긴 경로를 밟는 것입니다. "
국자에서 SAM으로 샘플을 얻는 것은 로버 암에서 멀티 챔버 장치의 복잡한 움직임으로 150 미크론 (0.006 인치)보다 큰 입자를 걸러내는 체를 통해 재료를 통과시킵니다. 체를 통과 한 일부 재료는 장치의 "부분"에서 실험실 입구 포트로 떨어졌습니다.
“우리는 진동을 시작하고 점차적으로 국자를 기울입니다.”라고 Morookian은 설명했습니다. "재료는 국자 끝에서 흘러 나와 한 번에 더 많은 흐름으로 흐릅니다."
체에 의해 차단 된 물질은지면에 버린다.
Curiosity 팀의 Ryan Anderson에 따르면 로버 Mastcam 및 MAHLI 카메라는 모두 스쿠 핑 프로세스를 철저하게 문서화하고 있으며 Mastcam은 스쿠 핑에서 남은 덤프 파일을 관찰하고 있으며 ChemCam은 파일의 수동 스펙트럼을 취합니다. . 마스트 캠은 또한 로버가 근처에있는 동안 모래 언덕의 모든 변화를 관찰하기 위해“Hebron”이라는 모래 언덕 이름을 여러 번 이미징 할 것입니다.
호기심의 최근 활동에 대한 자세한 내용은 Martian Chronicles 블로그 및 JPL의이 기사를 참조하십시오.
로버의 팔이 왜 셀프 이미지 모자이크에 나타나지 않는지 궁금하다면 이전 기사를 읽어보십시오.