MIT 엔지니어와 과학자들은 화성 표면에 야구 크기의 로봇 떼를 풀어줄 수있는 전략을 연구하고 있습니다. 이 로버의 장점 중 하나는 작업자가 용암을 잃어 버릴 염려가 없기 때문에 용암 관과 같은 매우 위험한 장소로 보내질 수 있다는 것입니다.
MIT 엔지니어와 과학자들은 화성 탐사의 미래에 대한 새로운 비전을 가지고 있습니다. 각 야구 공 크기의 탐사 떼가 모든 방향으로 지구 전체에 퍼져 있습니다.
연료 전지로 구동되는 수천 개의 프로브는 오늘날 로버가 도달 할 수없는 넓은 지역을 커버 할 수 있습니다.
연구팀을 이끌고있는 기계 공학과의 MIT 교수 인 Steven Dubowsky는“그들은 과학적 데이터 샘플을 채취하면서 지구 표면을 가로 질러 뛰어 다니고, 튀어 오르고, 흩어지기 시작했다.
Dubowsky의 팀은 올 가을 지구에서 프로토 타입을 테스트 할 계획이며 화성으로의 여행은 약 10 년 거리에 있다고 추정합니다. 그는 현재 뉴 멕시코 광업 기술 연구소의 동굴 연구 프로그램 책임자 인 Penelope Boston과 함께 화성의 거친 지형을 처리 할 수있는 탐사선을 개발하고 있습니다.
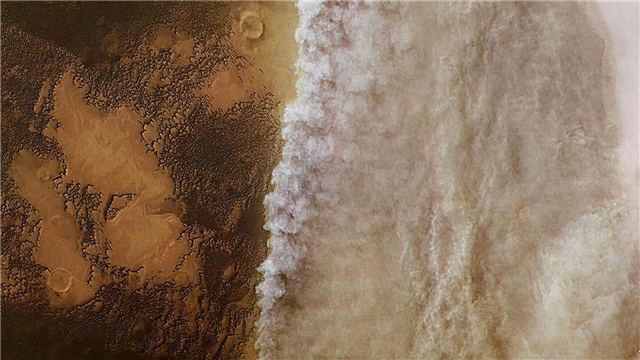
과학자들은 화성에서 흔히 볼 수있는 용암 튜브가 물의 흔적을 찾는 유망한 장소라고 생각합니다. 용암 튜브는 지하 용암 흐름에 의해 남겨진 터널입니다. 지구상의 여러 위치에 존재하는이 튜브의 표시는 지상에서 볼 수 있습니다.
튜브는 튜브의 부분이 무너진 화성 표면에 형성된 구멍을 통해 들어갈 수 있지만, 오늘날의 로버가 탐험하기에는 너무 위험합니다. 그러나 작은 수신 거부 프로브가 동굴 내부로 나갈 수 있습니다.
화성에는 한때 강이 흐르는 협곡도 있습니다. 협곡도 로버가 접근 할 수 없지만 작은 탐침이 협곡면을 통과 할 수 있습니다.
Dubowsky는 미니 프로브의 주요 장점 중 하나는 위험한 지역으로 보낸 수백 또는 수천 개의 프로브 중 몇 개를 잃어 버리면 전체 임무를 방해하지 않을 것이라고 말했다. 그는“먼저이 1000 개의 공 중 일부를 희생하여 기꺼이 희생하겠다”고 말했다.
각 탐침의 무게는 약 100 그램 (4 온스)이며 자체 소형 연료 전지를 가지고 다닐 것입니다. 듀보 스키는“몇 그램의 연료로 오랫동안 오랫동안 뛸 수있다”고 말했다.
프로브 내부의 인공 근육은 시간당 평균 6 회 홉으로 시간당 평균 6 회 홉을 만들 수 있습니다. 이 장치는 홉당 약 1.5 미터 이동합니다. 또한 바운스 또는 롤할 수 있습니다. Dubowsky에 따르면 30 일 안에 한 무리의 탐사선이 50 평방 마일을 덮을 수 있다고한다.
각 프로브에는 카메라 및 환경 센서를 포함한 다양한 유형의 센서가 장착되어 있습니다. 탐사선은 화성 이동 및 극한의 추위를 견딜 수있는 내구성과 경량 플라스틱으로 제작되었습니다. 연료 전지는 전자 장치와 센서가 작동 할 수 있도록 충분한 열을 제공합니다.
천개의 탐침은 스피릿 로버와 같은 부피와 무게를가집니다. Dubowsky는“Spirit의 무게와 크기에 따라 이러한 센서를 1,000 대 이상 전송할 수 있으며, 훨씬 더 큰 성능을 제공 할 수 있습니다.
프로브는 근거리 통신망 (LAN)을 통해 인근 프로브와 통신 할 수 있습니다. 데이터는 지구로 정보를 다시 전송하는 기지국으로 전송됩니다.
소형 로봇의 다른 가능한 응용 분야로는 붕괴 된 건물 또는 기타 위험한 장소에서의 수색 및 구조 임무, 반테러 활동 (동굴의 테러리스트 수색)이 있습니다.
작년에 연구원들은 NASA Institute for Advanced Concepts (NIAC)로부터 기금을 받았습니다. NIAC 보조금은 프로젝트를 컨셉 단계에서 프로토 타입 단계로 옮기는 데 도움이됩니다.
이 프로젝트의 다른 협력자들은 기계 공학과의 박사 후 연구원 인 Jean-Sebastien Plante와 Stanford University의 Fritz Prinz와 Mark Cutkowsky입니다.
원본 출처 : MIT 뉴스 릴리스